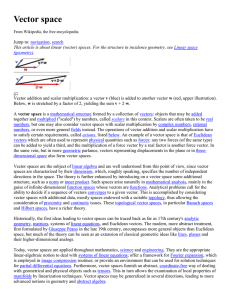





Cramer–Rao Lower Bound for Constrained Complex Parameters
... HE CRAMER–RAO lower bound (CRB) serves as an important tool in the performance evaluation of estimators which arise frequently in the fields of communications and signal processing. Most problems involving the CRB are formulated in terms of unconstrained real parameters [1]. Two useful developments ...
... HE CRAMER–RAO lower bound (CRB) serves as an important tool in the performance evaluation of estimators which arise frequently in the fields of communications and signal processing. Most problems involving the CRB are formulated in terms of unconstrained real parameters [1]. Two useful developments ...



force on a current in a magnetic field
... There are, however, two directions that are perpendicular to the plane ~ and B. ~ The correct direction may be chosen by applying the formed by A ~ into vector B ~ through the smaller “right-hand rule”: “Rotate vector A angle between their directions when they are placed tail-to-tail. Follow this ro ...
... There are, however, two directions that are perpendicular to the plane ~ and B. ~ The correct direction may be chosen by applying the formed by A ~ into vector B ~ through the smaller “right-hand rule”: “Rotate vector A angle between their directions when they are placed tail-to-tail. Follow this ro ...




Vector Calculus - New Age International
... perpendicular to the paper) is defined as the magnitude of the force times its arm which is the perpendicular distance between the axis of rotation and the line of action of force; that is t = Fr sin q = |r × F|. Thus r × F represents the torque of F about an axis through O and perpendicular to the ...
... perpendicular to the paper) is defined as the magnitude of the force times its arm which is the perpendicular distance between the axis of rotation and the line of action of force; that is t = Fr sin q = |r × F|. Thus r × F represents the torque of F about an axis through O and perpendicular to the ...








SELECTED SOLUTIONS FROM THE HOMEWORK 1. Solutions 1.2
... 1.3, 13 Establish that if the set {v1 , v2 , v3 } is linearly independent, then so is {v1 + v2 , v2 + v3 , v3 + v1 }. Proof. We’ll do this using the contrapositive. Thus, assume that {v1 + v2 , v2 + v3 , v3 + v1 } is linearly dependent. By definition, this means we can find a1 , a2 , a3 ∈ R such tha ...
... 1.3, 13 Establish that if the set {v1 , v2 , v3 } is linearly independent, then so is {v1 + v2 , v2 + v3 , v3 + v1 }. Proof. We’ll do this using the contrapositive. Thus, assume that {v1 + v2 , v2 + v3 , v3 + v1 } is linearly dependent. By definition, this means we can find a1 , a2 , a3 ∈ R such tha ...

Review of Linear Independence Theorems
... Definition. A basis for a vector space V is a list (v1 , . . . , vn ) which is linearly independent and spans V . Corollary of Replacement Theorem. If V is a vector space over a field F , Any two finite bases for V have the same number of elements. The proof is written out in Practice Quiz D. Defini ...
... Definition. A basis for a vector space V is a list (v1 , . . . , vn ) which is linearly independent and spans V . Corollary of Replacement Theorem. If V is a vector space over a field F , Any two finite bases for V have the same number of elements. The proof is written out in Practice Quiz D. Defini ...

