











Unit III, Functions
... I. Let f (x) = sin x. The sine function f (x) = sin x is neither strictly increasing nor strictly decreasing in its entire domain, and hence the sine function has no inverse in its entire domain. Now we need to choose an interval on which the sine function has an inverse on the restricted domain. To ...
... I. Let f (x) = sin x. The sine function f (x) = sin x is neither strictly increasing nor strictly decreasing in its entire domain, and hence the sine function has no inverse in its entire domain. Now we need to choose an interval on which the sine function has an inverse on the restricted domain. To ...

HOW TO DEDUCE A PROPER EIGENVALUE CLUSTER FROM A
... situations occur when dealing with partial differential equations and structured matrices (see, e.g., [2, 7]); in particular, concerning the aforementioned applications, we stress that there exist many tools for proving the singular value clustering in the nonnormal case [8, 6, 7], but not so many fo ...
... situations occur when dealing with partial differential equations and structured matrices (see, e.g., [2, 7]); in particular, concerning the aforementioned applications, we stress that there exist many tools for proving the singular value clustering in the nonnormal case [8, 6, 7], but not so many fo ...

10-1 Note 10 Rotational Motion I
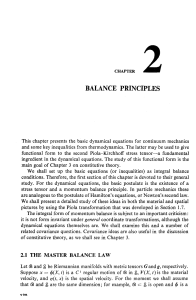
... can be separated into its translational and rotational components and those components solved for separately. This is possible because translational and rotational components of the motion of a rigid body do not interact with one another.1 We have already studied a particularly simple form of rotati ...
... can be separated into its translational and rotational components and those components solved for separately. This is possible because translational and rotational components of the motion of a rigid body do not interact with one another.1 We have already studied a particularly simple form of rotati ...


Modern index theory CIRM
... This index depends only on the symbol of D. The Atiyah-Singer index theorem expresses this index by means of a topological expression in terms of this symbol. Using a Chern character and applied to special operators coming from geometry, there is a very explicit cohomological formula for this index. ...
... This index depends only on the symbol of D. The Atiyah-Singer index theorem expresses this index by means of a topological expression in terms of this symbol. Using a Chern character and applied to special operators coming from geometry, there is a very explicit cohomological formula for this index. ...

Arakelov Class Groups
... We have seen that Pic0F is a finite number hF = # ClF of circle groups (real vector space modulo a lattice). We will define a finite set of uniformly distributed divisors in Pic0F to help us compute with this group. First we take the canonical metric on I coming from OF and scale it uniformly so tha ...
... We have seen that Pic0F is a finite number hF = # ClF of circle groups (real vector space modulo a lattice). We will define a finite set of uniformly distributed divisors in Pic0F to help us compute with this group. First we take the canonical metric on I coming from OF and scale it uniformly so tha ...

G. Kristensson. Spherical Vector Waves
... have contributed to the theory. A few of these giants are shown in Figure 1.2. The physics of electromagnetic phenomena takes place in space and time. Therefore, a time dependent description is a natural starting point of modeling the electromagnetic interaction with matter. In fact, this approach i ...
... have contributed to the theory. A few of these giants are shown in Figure 1.2. The physics of electromagnetic phenomena takes place in space and time. Therefore, a time dependent description is a natural starting point of modeling the electromagnetic interaction with matter. In fact, this approach i ...




