


Section 25. Components and Local Connectedness - Faculty
... from y to x and so y ∼ x. For transitivity, if x ∼ y and y ∼ z then there is a path f : [0, 1] → X from x to y and a path g : [1, 2] → X from y to x (by the comment above, WLOG we can assume the given domains of f and g). So ...
... from y to x and so y ∼ x. For transitivity, if x ∼ y and y ∼ z then there is a path f : [0, 1] → X from x to y and a path g : [1, 2] → X from y to x (by the comment above, WLOG we can assume the given domains of f and g). So ...






Physically-Based Motion Synthesis in Computer Graphics
... Interactive Manipulation of Rigid Body Simulations • Has convergence problems in the presence of discontinuities • Does not perform discrete search between different motion sequences • Interactivity requirement limits complexity of systems, motions • Is not appropriate for some multi-body problems ...
... Interactive Manipulation of Rigid Body Simulations • Has convergence problems in the presence of discontinuities • Does not perform discrete search between different motion sequences • Interactivity requirement limits complexity of systems, motions • Is not appropriate for some multi-body problems ...










Dr. LM Woodward/Dr. JR Parker - Department of Mathematical
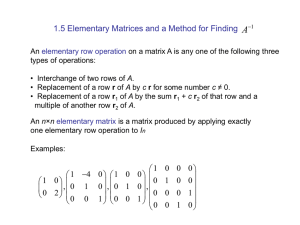
... Dot product on Rn . Length. Orthogonality. The components of one vector parallel and orthogonal to another. The Cauchy-Schwarz and triangle inequalities, angle. Term II Vector spaces (3) Motivation for generalisation. Definition and examples. Linear dependence. Bases, and coordinates with respect to ...
... Dot product on Rn . Length. Orthogonality. The components of one vector parallel and orthogonal to another. The Cauchy-Schwarz and triangle inequalities, angle. Term II Vector spaces (3) Motivation for generalisation. Definition and examples. Linear dependence. Bases, and coordinates with respect to ...

