

Vector Spaces – Chapter 4 of Lay
... • The zero vector for F is the zero function, f (t) = 0 for all t. Properties (1) - (10) can be verified to show that F is a vector space. Example: Property (2). Let f, g ∈ F . Then, (f + g)(t) = f (t) + g(t) = g(t) + f (t) = (g + f )(t). (3) Mm×n = the set of all m × n matrices is a vector space. • ...
... • The zero vector for F is the zero function, f (t) = 0 for all t. Properties (1) - (10) can be verified to show that F is a vector space. Example: Property (2). Let f, g ∈ F . Then, (f + g)(t) = f (t) + g(t) = g(t) + f (t) = (g + f )(t). (3) Mm×n = the set of all m × n matrices is a vector space. • ...
















Lecture 2 Mathcad basics and Matrix Operations - essie-uf
... “This Matrix must be square. It should have the same number of rows as columns” Note that y : = x^2 is the same as saying y := x*x Mathcad by default will always interpret any multiplication as a standard dot product type matrix multiplication, thus we can’t take a dot product of two row vectors, si ...
... “This Matrix must be square. It should have the same number of rows as columns” Note that y : = x^2 is the same as saying y := x*x Mathcad by default will always interpret any multiplication as a standard dot product type matrix multiplication, thus we can’t take a dot product of two row vectors, si ...

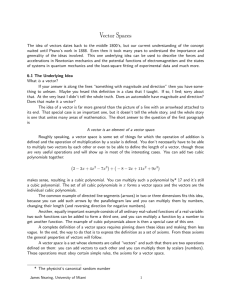
L6: Almost complex structures To study general symplectic
... Corollary: such an E canonically admits the structure of a complex vector bundle. Hence, it has a first Chern class. This is a “characteristic class”; we assign to each complex vector bundle E → B an element c1(E) ∈ H 2(B; Z) such that c1(f ∗E) = f ∗c1(E) is natural under continuous maps and pullbac ...
... Corollary: such an E canonically admits the structure of a complex vector bundle. Hence, it has a first Chern class. This is a “characteristic class”; we assign to each complex vector bundle E → B an element c1(E) ∈ H 2(B; Z) such that c1(f ∗E) = f ∗c1(E) is natural under continuous maps and pullbac ...



Solutions, PDF, 37 K - Brown math department
... row A is not left invertible. Solution: All right inverses of the matrix are (x, 1 − x)T , x ∈ R (taking all possible values of x we get all possible right inverses). The matrix is right invertible. If it is left invertible, it is invertible and its right inverse is unique (and coincide with the inv ...
... row A is not left invertible. Solution: All right inverses of the matrix are (x, 1 − x)T , x ∈ R (taking all possible values of x we get all possible right inverses). The matrix is right invertible. If it is left invertible, it is invertible and its right inverse is unique (and coincide with the inv ...


Cartesian tensor

In geometry and linear algebra, a Cartesian tensor uses an orthonormal basis to represent a tensor in a Euclidean space in the form of components. Converting a tensor's components from one such basis to another is through an orthogonal transformation.The most familiar coordinate systems are the two-dimensional and three-dimensional Cartesian coordinate systems. Cartesian tensors may be used with any Euclidean space, or more technically, any finite-dimensional vector space over the field of real numbers that has an inner product.Use of Cartesian tensors occurs in physics and engineering, such as with the Cauchy stress tensor and the moment of inertia tensor in rigid body dynamics. Sometimes general curvilinear coordinates are convenient, as in high-deformation continuum mechanics, or even necessary, as in general relativity. While orthonormal bases may be found for some such coordinate systems (e.g. tangent to spherical coordinates), Cartesian tensors may provide considerable simplification for applications in which rotations of rectilinear coordinate axes suffice. The transformation is a passive transformation, since the coordinates are changed and not the physical system.