

Vector space From Wikipedia, the free encyclopedia Jump to
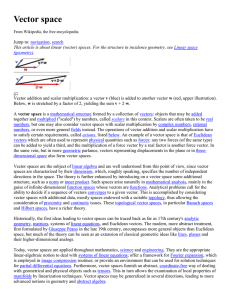
... A vector space is a mathematical structure formed by a collection of vectors: objects that may be added together and multiplied ("scaled") by numbers, called scalars in this context. Scalars are often taken to be real numbers, but one may also consider vector spaces with scalar multiplication by com ...
... A vector space is a mathematical structure formed by a collection of vectors: objects that may be added together and multiplied ("scaled") by numbers, called scalars in this context. Scalars are often taken to be real numbers, but one may also consider vector spaces with scalar multiplication by com ...


Relation to the de Rham cohomology of Lie groups
... We will typically write H ∗ (M ; R) when we refer to cohomology, even though it may be coming from forms. The de Rham cohomology of the compact Lie group G is isomorphic to the Lie algebra cohomology of the Lie algebra g (Theorem 2.3). Actually, the Lie algebra cohomology can be defined as the cohom ...
... We will typically write H ∗ (M ; R) when we refer to cohomology, even though it may be coming from forms. The de Rham cohomology of the compact Lie group G is isomorphic to the Lie algebra cohomology of the Lie algebra g (Theorem 2.3). Actually, the Lie algebra cohomology can be defined as the cohom ...


2D Geometry Points, Distances, and Directions
... the vector are given. Above we give the equations for computing the polar coordinates from the xy coordinates of a vector. To go from polar coordinates to xy coordinates use: v = ||v||*(cos θ, sin θ) where ||v|| is the length of v and θ = angle ( v ) is the angle of v ...
... the vector are given. Above we give the equations for computing the polar coordinates from the xy coordinates of a vector. To go from polar coordinates to xy coordinates use: v = ||v||*(cos θ, sin θ) where ||v|| is the length of v and θ = angle ( v ) is the angle of v ...

Matrix Vocabulary
... *In order to multiply two matrices, the # of columns of the first matrix must equal the number of rows of the second. To determine if it is possible to multiply two matrices check the number of columns of the first matrix with the rows of the second (The inside numbers): ...
... *In order to multiply two matrices, the # of columns of the first matrix must equal the number of rows of the second. To determine if it is possible to multiply two matrices check the number of columns of the first matrix with the rows of the second (The inside numbers): ...
















Cartesian tensor

In geometry and linear algebra, a Cartesian tensor uses an orthonormal basis to represent a tensor in a Euclidean space in the form of components. Converting a tensor's components from one such basis to another is through an orthogonal transformation.The most familiar coordinate systems are the two-dimensional and three-dimensional Cartesian coordinate systems. Cartesian tensors may be used with any Euclidean space, or more technically, any finite-dimensional vector space over the field of real numbers that has an inner product.Use of Cartesian tensors occurs in physics and engineering, such as with the Cauchy stress tensor and the moment of inertia tensor in rigid body dynamics. Sometimes general curvilinear coordinates are convenient, as in high-deformation continuum mechanics, or even necessary, as in general relativity. While orthonormal bases may be found for some such coordinate systems (e.g. tangent to spherical coordinates), Cartesian tensors may provide considerable simplification for applications in which rotations of rectilinear coordinate axes suffice. The transformation is a passive transformation, since the coordinates are changed and not the physical system.