Chapter 3: Two-Dimensional Motion and Vectors
... • The sine and cosine functions can be used to find the components of a vector. • The sine and cosine functions are defined in terms of the lengths of the sides of right ...
... • The sine and cosine functions can be used to find the components of a vector. • The sine and cosine functions are defined in terms of the lengths of the sides of right ...



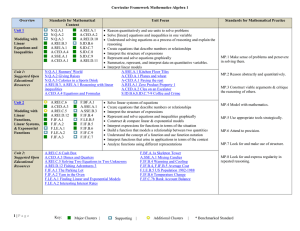
Curricular Framework Mathematics Overview Standards for Mathematical Unit Focus
... A.CED.A.2. Create equations in two or more variables to represent relationships between quantities; Graph equations on coordinate axes with labels and scales. N.Q.A.1. Use units as a way to understand problems and to guide the solution of multi-step problems; Choose and interpret units consistently ...
... A.CED.A.2. Create equations in two or more variables to represent relationships between quantities; Graph equations on coordinate axes with labels and scales. N.Q.A.1. Use units as a way to understand problems and to guide the solution of multi-step problems; Choose and interpret units consistently ...








Computational Experiments for the Problem of
... e.g. [1] – [3]). have natural applications in the design of experiments. In particular, the problem of Hamiltonian path with fixed number of color repetitions for c-arc-colored digraphs can be used for scenarios creation for self-learning of intelligent mobile robots. Note that the problem of Hamilto ...
... e.g. [1] – [3]). have natural applications in the design of experiments. In particular, the problem of Hamiltonian path with fixed number of color repetitions for c-arc-colored digraphs can be used for scenarios creation for self-learning of intelligent mobile robots. Note that the problem of Hamilto ...




State-Dependent Riccati Equation Control with Predicted Trajectory
... feedback gain and the control signal may be obtained. The assumption on the knowledge of the state trajectory may be satisfied at a given time instant k first estimating the current and future control signal values for k, k + 1, k + 2,…, k + kp-1. These values might for example be approximated using ...
... feedback gain and the control signal may be obtained. The assumption on the knowledge of the state trajectory may be satisfied at a given time instant k first estimating the current and future control signal values for k, k + 1, k + 2,…, k + kp-1. These values might for example be approximated using ...


Construct and justify arguments and solve multistep problems
... Find the measures of each of the sides in Triangle JKL. The perimeter of Triangle JKL is 164 cm. Show your work to solve the problem and give an explanation for the rationale behind setting up the problem. The measure of'is x cm. — The measure of^ls 4 cm less than 8 times the measure oftfjc^ is 3 cm ...
... Find the measures of each of the sides in Triangle JKL. The perimeter of Triangle JKL is 164 cm. Show your work to solve the problem and give an explanation for the rationale behind setting up the problem. The measure of'is x cm. — The measure of^ls 4 cm less than 8 times the measure oftfjc^ is 3 cm ...