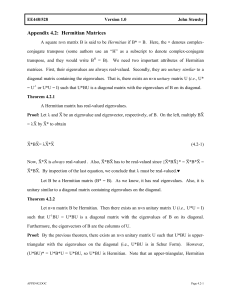
Appendix 4.2: Hermitian Matrices r r r r r r r r r r r r r r r r r r
... An n×n Hermitian matrix H is positive (alternatively, nonnegative) definite if, and only if, there exists a positive (alternatively, nonnegative) definite Hermitian matrix H0 such that H02 = H. Matrix H0 is called the square root of H. Proof: (We prove the positive definite case; the nonnegative def ...
... An n×n Hermitian matrix H is positive (alternatively, nonnegative) definite if, and only if, there exists a positive (alternatively, nonnegative) definite Hermitian matrix H0 such that H02 = H. Matrix H0 is called the square root of H. Proof: (We prove the positive definite case; the nonnegative def ...

Sections 3.4-3.6
... A vector space so large that no finite set of vectors spans it is called infinitedimensional. The Dimension of the Column Space of a Matrix Column Space of a Matrix: The pivot columns of a matrix A form a basis for ColA. Then the dimension of the column space, denoted dim(ColA), is the number of pi ...
... A vector space so large that no finite set of vectors spans it is called infinitedimensional. The Dimension of the Column Space of a Matrix Column Space of a Matrix: The pivot columns of a matrix A form a basis for ColA. Then the dimension of the column space, denoted dim(ColA), is the number of pi ...

![[2012 solutions]](http://s1.studyres.com/store/data/008844911_1-801f2c6ec896db15646b0285c5651457-300x300.png)


Math 2270 - Lecture 33 : Positive Definite Matrices
... I’ve already told you what a positive definite matrix is. A matrix is positive definite if it’s symmetric and all its eigenvalues are positive. The thing is, there are a lot of other equivalent ways to define a positive definite matrix. One equivalent definition can be derived using the fact that fo ...
... I’ve already told you what a positive definite matrix is. A matrix is positive definite if it’s symmetric and all its eigenvalues are positive. The thing is, there are a lot of other equivalent ways to define a positive definite matrix. One equivalent definition can be derived using the fact that fo ...



ECO4112F Section 5 Eigenvalues and eigenvectors
... which is equal to the sum of the eigenvalues tr A = 2 + 2 + 3 = 7. The determinant is (expanding by the second row) det A = 2(4 + 2) = 12 which is equal to the product of the eigenvalues det A = (2)(2)(3) = 12. ...
... which is equal to the sum of the eigenvalues tr A = 2 + 2 + 3 = 7. The determinant is (expanding by the second row) det A = 2(4 + 2) = 12 which is equal to the product of the eigenvalues det A = (2)(2)(3) = 12. ...

Math F412: Homework 7 Solutions March 20, 2013 1. Suppose V is
... V is symmetric. Show that T has no complex eigenvalues. Hint: Let W be the complex vector space of vectors of the form a + ib where a, b ∈ V . You need not show that this is a vector space. We extend T to a map T ∶ W → W by T(a + ib) = Ta + iTb. It’s easy to see that this map is complex linear; don’ ...
... V is symmetric. Show that T has no complex eigenvalues. Hint: Let W be the complex vector space of vectors of the form a + ib where a, b ∈ V . You need not show that this is a vector space. We extend T to a map T ∶ W → W by T(a + ib) = Ta + iTb. It’s easy to see that this map is complex linear; don’ ...



Lecture 3
... This method is based on the principle of using suitable linear combination of rows to obtain a sequence of equivalent systems A(1)x = b(1) → A(2)x = b(2) → · · · → A(n)x = b(n) where the last one is in triangular form • This is the algorithm having the lowest computational complexity for general mat ...
... This method is based on the principle of using suitable linear combination of rows to obtain a sequence of equivalent systems A(1)x = b(1) → A(2)x = b(2) → · · · → A(n)x = b(n) where the last one is in triangular form • This is the algorithm having the lowest computational complexity for general mat ...


Levi-Civita symbol
... For equation 1, both sides are antisymmetric with respect of ij and mn. We therefore only need to consider the case and . By substitution, we see that the equation holds for , i.e., for i = m = 1 and j = n = 2. (Both sides are then one). Since the equation is antisymmetric in ij and mn, any set of v ...
... For equation 1, both sides are antisymmetric with respect of ij and mn. We therefore only need to consider the case and . By substitution, we see that the equation holds for , i.e., for i = m = 1 and j = n = 2. (Both sides are then one). Since the equation is antisymmetric in ij and mn, any set of v ...

Review Dimension of Col(A) and Nul(A) 1
... • dim Nul(A) = n − r is the number of free variables of A Why? In our recipe for a basis for Nul(A), each free variable corresponds to an element in the ...
... • dim Nul(A) = n − r is the number of free variables of A Why? In our recipe for a basis for Nul(A), each free variable corresponds to an element in the ...


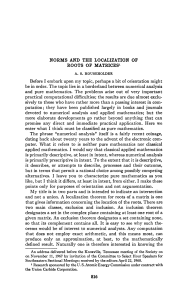
NORMS AND THE LOCALIZATION OF ROOTS OF MATRICES1
... I t is easy to see why norms should be useful to the numerical analyst. They provide the obvious tools for measuring rates of convergence of sequences in w-space, and in the measurement of error. The rather surprising fact is that they seem not to have come into general use until the late 1950's, al ...
... I t is easy to see why norms should be useful to the numerical analyst. They provide the obvious tools for measuring rates of convergence of sequences in w-space, and in the measurement of error. The rather surprising fact is that they seem not to have come into general use until the late 1950's, al ...




1. Let A = 3 2 −1 1 3 2 4 5 1 . The rank of A is (a) 2 (b) 3 (c) 0 (d) 4 (e
... The product of the roots, with multiplicities, of any polynomial with leading coefficient 1 is (−1)n times the product of the roots where n is the degree: (t − λ1 )(t − λ2 ) · · · (t − λn ) = tn + · · · + (−1)n (λ1 · · · λn ). In this case λ1 λ2 = det A so the answer is −28. ...
... The product of the roots, with multiplicities, of any polynomial with leading coefficient 1 is (−1)n times the product of the roots where n is the degree: (t − λ1 )(t − λ2 ) · · · (t − λn ) = tn + · · · + (−1)n (λ1 · · · λn ). In this case λ1 λ2 = det A so the answer is −28. ...

On Distributed Coordination of Mobile Agents
... The first two conditions of the theorem basically states that a finite set of stochastic matrices is LCP if and only if all finite products formed from the finite set of matrices are ergodic matrices themselves. This is a classical result due to Wolfowitz [19]. Note that ergodicity of each matrix is ...
... The first two conditions of the theorem basically states that a finite set of stochastic matrices is LCP if and only if all finite products formed from the finite set of matrices are ergodic matrices themselves. This is a classical result due to Wolfowitz [19]. Note that ergodicity of each matrix is ...