Math 215 HW #9 Solutions
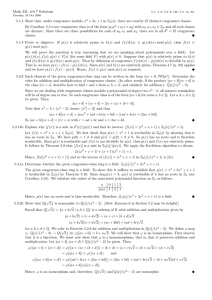
... where in the second-to-last equality we used the fact that A~x = λ~x. Thus, we see that ~x is an eigenvector for the matrix A2 with corresponding eigenvalue λ2 , so indeed λ2 is an eigenvalue for A2 . (b) λ−1 is an eigenvalue of A−1 . Proof. Since we know A~x = λ~x we can (assuming A is invertible) ...
... where in the second-to-last equality we used the fact that A~x = λ~x. Thus, we see that ~x is an eigenvector for the matrix A2 with corresponding eigenvalue λ2 , so indeed λ2 is an eigenvalue for A2 . (b) λ−1 is an eigenvalue of A−1 . Proof. Since we know A~x = λ~x we can (assuming A is invertible) ...

Some remarks on the discrete uncertainty principle,
... non-singular matrix has the property required by the theorem. Indeed, if we view the ai j as variables, each vanishing determinant determines a subspace of dimension at ij most n 2 − 1. The Fourier transform corresponds to the matrix in which ai j = ζn where ζn is a primitive n-th root of unity. One ...
... non-singular matrix has the property required by the theorem. Indeed, if we view the ai j as variables, each vanishing determinant determines a subspace of dimension at ij most n 2 − 1. The Fourier transform corresponds to the matrix in which ai j = ζn where ζn is a primitive n-th root of unity. One ...


form Given matrix The determinant is indicated by
... together… this is your “DOWN” total. 4) Draw “Up” diagonals under each of the three 3-term “Up” diagonals. ...
... together… this is your “DOWN” total. 4) Draw “Up” diagonals under each of the three 3-term “Up” diagonals. ...

Analysis on arithmetic quotients Chapter I. The geometry of SL(2)
... when dealing with more general Lie groups. It is used to keep track of the collection of conjugacy classes of algebraic tori—in effect, it conjugates the compact torus of SL2 (R) to the split torus, but inside SL2 (C). One application of the Cayley transform is to answer easily a basic question abou ...
... when dealing with more general Lie groups. It is used to keep track of the collection of conjugacy classes of algebraic tori—in effect, it conjugates the compact torus of SL2 (R) to the split torus, but inside SL2 (C). One application of the Cayley transform is to answer easily a basic question abou ...




Solutions to Math 51 First Exam — April 21, 2011
... for C(A); we can thus eliminate from further consideration all such sets in the above list. We’re left to consider the three remaining three-element sets of column vectors listed above. Now, recall that according to a result from Chapter 12 of the text, a three-element subset of a three-dimensional ...
... for C(A); we can thus eliminate from further consideration all such sets in the above list. We’re left to consider the three remaining three-element sets of column vectors listed above. Now, recall that according to a result from Chapter 12 of the text, a three-element subset of a three-dimensional ...