


LINEAR TRANSFORMATIONS Math 21b, O. Knill
... b) Find the linear transformation, which reflects a vector at the line containing the vector (1, 1, 1). INVERSE OF A TRANSFORMATION. If S is a second transformation such that S(T ~x) = ~x, for every ~x, then S is called the inverse of T . We will discuss this more later. SOLVING A LINEAR SYSTEM OF E ...
... b) Find the linear transformation, which reflects a vector at the line containing the vector (1, 1, 1). INVERSE OF A TRANSFORMATION. If S is a second transformation such that S(T ~x) = ~x, for every ~x, then S is called the inverse of T . We will discuss this more later. SOLVING A LINEAR SYSTEM OF E ...




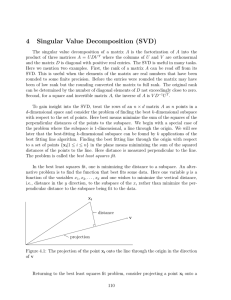
4 Singular Value Decomposition (SVD)
... product of three matrices A = U DV T where the columns of U and V are orthonormal and the matrix D is diagonal with positive real entries. The SVD is useful in many tasks. Here we mention two examples. First, the rank of a matrix A can be read off from its SVD. This is useful when the elements of the ...
... product of three matrices A = U DV T where the columns of U and V are orthonormal and the matrix D is diagonal with positive real entries. The SVD is useful in many tasks. Here we mention two examples. First, the rank of a matrix A can be read off from its SVD. This is useful when the elements of the ...

Applications
... INPUT: matrix A, rank parameter k, number of columns c OUTPUT: matrix of selected columns C • Compute the probabilities pi; • For each j = 1,2,…,n, pick the j-th column of A with probability min{1,cpj} • Let C be the matrix containing the sampled columns; (C has · c columns in expectation) ...
... INPUT: matrix A, rank parameter k, number of columns c OUTPUT: matrix of selected columns C • Compute the probabilities pi; • For each j = 1,2,…,n, pick the j-th column of A with probability min{1,cpj} • Let C be the matrix containing the sampled columns; (C has · c columns in expectation) ...






Octave Tutorial 2
... extracts, from the second row, all the elements between the first and the third column (included). Try it! To extract an entire row or column, use the colon : operator like this, octave#:#> X(1,:) This will extract the first row of the matrix X. In this notation, the : operator refers to all the ele ...
... extracts, from the second row, all the elements between the first and the third column (included). Try it! To extract an entire row or column, use the colon : operator like this, octave#:#> X(1,:) This will extract the first row of the matrix X. In this notation, the : operator refers to all the ele ...


Linear transformations and matrices Math 130 Linear Algebra
... So far we’ve only looked at the case when the second matrix of a product is a column vector. Later on we’ll look at the general case. Linear operators on Rn , eigenvectors, and eigenvalues. Very often we are interested in the case when m = n. A linear transformation T : Rn → Rn is also called a line ...
... So far we’ve only looked at the case when the second matrix of a product is a column vector. Later on we’ll look at the general case. Linear operators on Rn , eigenvectors, and eigenvalues. Very often we are interested in the case when m = n. A linear transformation T : Rn → Rn is also called a line ...



