
Optimal Bounds on Theta-Graphs: More is not Always Better
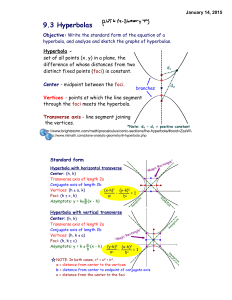
... • If axw is empty, then δ(u, w) ≤ |ub| + |bw|. • If byw is empty, then δ(u, w) ≤ |ua| + |aw|. • If neither axw nor byw is empty, then δ(u, w) ≤ max{|ua| + |aw|, |ub| + |bw|}. We first show that this induction hypothesis implies the theorem. Basic trigonometry gives us the following equalities: |um| ...
... • If axw is empty, then δ(u, w) ≤ |ub| + |bw|. • If byw is empty, then δ(u, w) ≤ |ua| + |aw|. • If neither axw nor byw is empty, then δ(u, w) ≤ max{|ua| + |aw|, |ub| + |bw|}. We first show that this induction hypothesis implies the theorem. Basic trigonometry gives us the following equalities: |um| ...

Angles in Polygons
... So, divide to find the measure of one interior angle. Answer The measure of an interior angle of a re$ular octagon ...
... So, divide to find the measure of one interior angle. Answer The measure of an interior angle of a re$ular octagon ...

The Euler characteristic of an even
... subgraphs of the unit spheres and this is by far the fastest way to compute χ(G). Done on a computer, it beats every other method at great length. It essentially makes the computation of Euler characteristic a polynomial task from a practical point of view. (There are graphs with high dimension, whe ...
... subgraphs of the unit spheres and this is by far the fastest way to compute χ(G). Done on a computer, it beats every other method at great length. It essentially makes the computation of Euler characteristic a polynomial task from a practical point of view. (There are graphs with high dimension, whe ...




3-2 Proving Lines Parallel
... • Theorem 3-8: Converse of the Same-Side Exterior Angle Theorem • If 2 lines and a transversal form same-side exterior angles that are supplementary, then the two lines are parallel ...
... • Theorem 3-8: Converse of the Same-Side Exterior Angle Theorem • If 2 lines and a transversal form same-side exterior angles that are supplementary, then the two lines are parallel ...

Applicable Analysis and Discrete Mathematics TOWARDS A
... the Q–angles ; in fact γij is the cosine of the angle between the unit vector ej (corresponding to vertex j of G) and the eigenspace for κi . We also define the Q–angle matrix of G, i.e. an m × n matrix (m is the number of its distinct eigenvalues, while n is the order of G) as the matrix Γ = (γij ) ...
... the Q–angles ; in fact γij is the cosine of the angle between the unit vector ej (corresponding to vertex j of G) and the eigenspace for κi . We also define the Q–angle matrix of G, i.e. an m × n matrix (m is the number of its distinct eigenvalues, while n is the order of G) as the matrix Γ = (γij ) ...

On right-angled reflection groups in hyperbolic spaces
... only if n ≤ 29. Examples are known only up to n = 8. M. Prokhorov [Pr] proved that non-compact Coxeter polyhedra of finite volume may exist only if n ≤ 995; examples are known only up to n = 21 [Bor]. There are some strong restrictions on the combinatorial structure of Coxeter polyhedra arising from ...
... only if n ≤ 29. Examples are known only up to n = 8. M. Prokhorov [Pr] proved that non-compact Coxeter polyhedra of finite volume may exist only if n ≤ 995; examples are known only up to n = 21 [Bor]. There are some strong restrictions on the combinatorial structure of Coxeter polyhedra arising from ...



CROSSING NUMBERS AND DISTINCT DISTANCES The
... and then Katz-Tardos improved the estimates in the distinct distance problem. KatzTardos proved that for any N points in the plane, one of the points determines ≥ cN .864 distances with the other points. This approach gave the best estimate in the distinct distance problem before the polynomial meth ...
... and then Katz-Tardos improved the estimates in the distinct distance problem. KatzTardos proved that for any N points in the plane, one of the points determines ≥ cN .864 distances with the other points. This approach gave the best estimate in the distinct distance problem before the polynomial meth ...

Math 11 Final Fall 2010
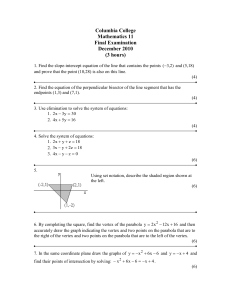
... 1. Find the slope-intercept equation of the line that contains the points (3,2) and (5,18) and prove that the point (10,28) is also on this line. ...
... 1. Find the slope-intercept equation of the line that contains the points (3,2) and (5,18) and prove that the point (10,28) is also on this line. ...
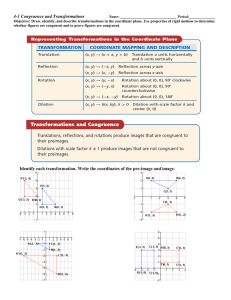
An auxiliary line is a line that is added to a figure to aid in a proof. An
... Consider the triangle whose vertices are A(-3, 2), B(-1, -4), and C(3, 0). Use a piece of graph paper to perform the following transformations. Make sure to draw an x and y-axis below. 1. Plot the original triangle in pencil. Use the color blue to perform a translation 5 units to the left and 2 ...
... Consider the triangle whose vertices are A(-3, 2), B(-1, -4), and C(3, 0). Use a piece of graph paper to perform the following transformations. Make sure to draw an x and y-axis below. 1. Plot the original triangle in pencil. Use the color blue to perform a translation 5 units to the left and 2 ...


Geometry Session 6: Classifying Triangles Activity Sheet
... We saw in Session 5 that symmetry can be used for classifying designs. We will try this for triangles. The activity sheet for sorting triangles has several triangles to classify, but instead of ...
... We saw in Session 5 that symmetry can be used for classifying designs. We will try this for triangles. The activity sheet for sorting triangles has several triangles to classify, but instead of ...



Euclid axioms.
... 1. Every two points lie on exactly one line. 2. Any line segment with given endpoints may be continued in either direction. 3. It is possible to construct a circle with any point as its centre and with a radius of any length. 4. All right angles are equal. 5. Given a line L and a point not on L ...
... 1. Every two points lie on exactly one line. 2. Any line segment with given endpoints may be continued in either direction. 3. It is possible to construct a circle with any point as its centre and with a radius of any length. 4. All right angles are equal. 5. Given a line L and a point not on L ...

Steinitz's theorem

In polyhedral combinatorics, a branch of mathematics, Steinitz's theorem is a characterization of the undirected graphs formed by the edges and vertices of three-dimensional convex polyhedra: they are exactly the (simple) 3-vertex-connected planar graphs (with at least four vertices). That is, every convex polyhedron forms a 3-connected planar graph, and every 3-connected planar graph can be represented as the graph of a convex polyhedron. For this reason, the 3-connected planar graphs are also known as polyhedral graphs. Steinitz's theorem is named after Ernst Steinitz, who submitted its first proof for publication in 1916. Branko Grünbaum has called this theorem “the most important and deepest known result on 3-polytopes.”The name ""Steinitz's theorem"" has also been applied to other results of Steinitz: the Steinitz exchange lemma implying that each basis of a vector space has the same number of vectors, the theorem that if the convex hull of a point set contains a unit sphere, then the convex hull of a finite subset of the point contains a smaller concentric sphere, and Steinitz's vectorial generalization of the Riemann series theorem on the rearrangements of conditionally convergent series.↑ ↑ 2.0 2.1 ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑