


SIMPLEST SINGULARITY IN NON-ALGEBRAIC
... A classical question in complex analytic geometry is to understand when a given analytic space is algebraic (i.e. analytification of an algebraic scheme). A necessary condition for this to hold is that the transcendence degree of the field of global meromorphic functions must be equal to the dimensi ...
... A classical question in complex analytic geometry is to understand when a given analytic space is algebraic (i.e. analytification of an algebraic scheme). A necessary condition for this to hold is that the transcendence degree of the field of global meromorphic functions must be equal to the dimensi ...
tetrahedron - PlanetMath.org
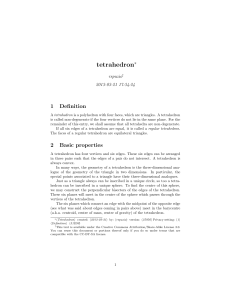
... If all six edges of a tetrahedron are equal, it is called a regular tetrahedron. The faces of a regular tetrahedron are equilateral triangles. ...
... If all six edges of a tetrahedron are equal, it is called a regular tetrahedron. The faces of a regular tetrahedron are equilateral triangles. ...

1 and PC = x + 9, find AC. SOLUTION
... Each pair of opposite angles of a rhombus is congruent. So, 12. If ...
... Each pair of opposite angles of a rhombus is congruent. So, 12. If ...

Blocking Coloured Point Sets
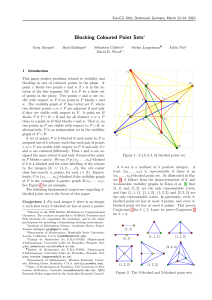
... point x blocks two points v and w if x is in the interior of the line segment vw. Let P be a finite set of points in the plane. Two points v and w are visible with respect to P if no point in P blocks v and w. The visibility graph of P has vertex set P , where two distinct points v, w ∈ P are adjace ...
... point x blocks two points v and w if x is in the interior of the line segment vw. Let P be a finite set of points in the plane. Two points v and w are visible with respect to P if no point in P blocks v and w. The visibility graph of P has vertex set P , where two distinct points v, w ∈ P are adjace ...

CBSE Class IX Maths
... Q 18: Given two points A and B and a positive real number k. Find the locus of a point P such that ar( ...
... Q 18: Given two points A and B and a positive real number k. Find the locus of a point P such that ar( ...



1957 amc 12/ahsme - Art of Problem Solving
... 2. The base angles of an isosceles triangle are equal. 3. If a triangle is not isosceles, then two of its angles are not equal. 4. A necessary condition that two angles of a triangle be equal is that the triangle be isosceles. Which combination of statements contains only those which are logically e ...
... 2. The base angles of an isosceles triangle are equal. 3. If a triangle is not isosceles, then two of its angles are not equal. 4. A necessary condition that two angles of a triangle be equal is that the triangle be isosceles. Which combination of statements contains only those which are logically e ...

4-5 Isosceles and Equilateral Triangles
... triangle are its legs • The third side is the base • The two congruent legs form the vertex angle • The other two angles are the base angles ...
... triangle are its legs • The third side is the base • The two congruent legs form the vertex angle • The other two angles are the base angles ...



13b.pdf
... The converse assertion, that suspensions of elliptic orbifolds and tetrahedral orbifolds are not Haken, is fairly simple to demonstrate. In general, for a curve γ on ∂XO to determine an incompressible suborbifold, it can never enter the same face twice, and it can enter two faces which touch only al ...
... The converse assertion, that suspensions of elliptic orbifolds and tetrahedral orbifolds are not Haken, is fairly simple to demonstrate. In general, for a curve γ on ∂XO to determine an incompressible suborbifold, it can never enter the same face twice, and it can enter two faces which touch only al ...



Algebra_2_files/Scope and Sequence Alg 2A 2013-14
... I can explain that every point on the graph of an equation represents values x and y that make the equation true. I can graph a linear inequality on a coordinate plane resulting in a boundary line (solid or dashed) and a shaded half-plane. I can define a function as a relation in which each input (d ...
... I can explain that every point on the graph of an equation represents values x and y that make the equation true. I can graph a linear inequality on a coordinate plane resulting in a boundary line (solid or dashed) and a shaded half-plane. I can define a function as a relation in which each input (d ...






Steinitz's theorem

In polyhedral combinatorics, a branch of mathematics, Steinitz's theorem is a characterization of the undirected graphs formed by the edges and vertices of three-dimensional convex polyhedra: they are exactly the (simple) 3-vertex-connected planar graphs (with at least four vertices). That is, every convex polyhedron forms a 3-connected planar graph, and every 3-connected planar graph can be represented as the graph of a convex polyhedron. For this reason, the 3-connected planar graphs are also known as polyhedral graphs. Steinitz's theorem is named after Ernst Steinitz, who submitted its first proof for publication in 1916. Branko Grünbaum has called this theorem “the most important and deepest known result on 3-polytopes.”The name ""Steinitz's theorem"" has also been applied to other results of Steinitz: the Steinitz exchange lemma implying that each basis of a vector space has the same number of vectors, the theorem that if the convex hull of a point set contains a unit sphere, then the convex hull of a finite subset of the point contains a smaller concentric sphere, and Steinitz's vectorial generalization of the Riemann series theorem on the rearrangements of conditionally convergent series.↑ ↑ 2.0 2.1 ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑