









Introduction to Topological Groups
... Section 7 is dedicated to specific properties of the (locally) compact groups used essentially in these notes. The most important property we recall in §7.1 is the open mapping theorem. In §7.2 we recall (with complete proofs) the structure of the closed subgroups of Rn as well as the description of ...
... Section 7 is dedicated to specific properties of the (locally) compact groups used essentially in these notes. The most important property we recall in §7.1 is the open mapping theorem. In §7.2 we recall (with complete proofs) the structure of the closed subgroups of Rn as well as the description of ...

homotopy types of topological stacks
... one to transport homotopical information back and forth between the diagram and its homotopy type. The above theorem has various applications. For example, it implies an equivariant version of Theorem 1.1 for the (weak) action of a discrete group. It also allows one to define homotopy types of pairs ...
... one to transport homotopical information back and forth between the diagram and its homotopy type. The above theorem has various applications. For example, it implies an equivariant version of Theorem 1.1 for the (weak) action of a discrete group. It also allows one to define homotopy types of pairs ...
TOPOLOGY 004C Contents 1. Introduction 1 2. Basic notions 2 3
... Lemma 6.4. Let f : X → Y be surjective, open, continuous map of topological spaces. Let T ⊂ Y be a subset. Then (1) f −1 (T ) = f −1 (T ), (2) T ⊂ Y is closed if and only f −1 (T ) is closed, (3) T ⊂ Y is open if and only f −1 (T ) is open, and (4) T ⊂ Y is locally closed if and only f −1 (T ) is lo ...
... Lemma 6.4. Let f : X → Y be surjective, open, continuous map of topological spaces. Let T ⊂ Y be a subset. Then (1) f −1 (T ) = f −1 (T ), (2) T ⊂ Y is closed if and only f −1 (T ) is closed, (3) T ⊂ Y is open if and only f −1 (T ) is open, and (4) T ⊂ Y is locally closed if and only f −1 (T ) is lo ...

Projective Geometry on Manifolds - UMD MATH
... a group G of transformations of X. For example Euclidean geometry is the geometry of n-dimensional Euclidean space Rn invariant under its group of rigid motions. This is the group of transformations which tranforms an object ξ into an object congruent to ξ. In Euclidean geometry can speak of points, ...
... a group G of transformations of X. For example Euclidean geometry is the geometry of n-dimensional Euclidean space Rn invariant under its group of rigid motions. This is the group of transformations which tranforms an object ξ into an object congruent to ξ. In Euclidean geometry can speak of points, ...

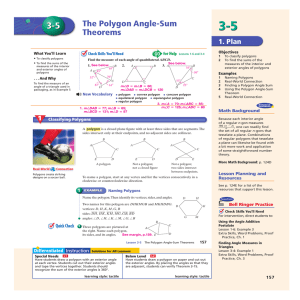
Planar Graphs – p. 1
... Lemma. Let G be a planar graph and let C ⊂ G be a cycle. The cycle C is the boundary of a face for every embedding of G in S 2 if and only if G − C is connected. Proof. If G − C is connected, then for any embedding of G in S 2 , the connected set G − C is contained in one of the two disks bounded by ...
... Lemma. Let G be a planar graph and let C ⊂ G be a cycle. The cycle C is the boundary of a face for every embedding of G in S 2 if and only if G − C is connected. Proof. If G − C is connected, then for any embedding of G in S 2 , the connected set G − C is contained in one of the two disks bounded by ...

METRIC AND TOPOLOGICAL SPACES
... In the previous chapter we left an important problem unsolved: given metric spaces (X, dX ) and (Y, dY ), is there a right choice of a metric for X × Y ? The answer to this question lies in the notion of open subsets of metric spaces: two metrics are equivalent if they define the same open subsets. ...
... In the previous chapter we left an important problem unsolved: given metric spaces (X, dX ) and (Y, dY ), is there a right choice of a metric for X × Y ? The answer to this question lies in the notion of open subsets of metric spaces: two metrics are equivalent if they define the same open subsets. ...