

MC Practice #1 Ekina momuntum starter
... Two identical carts travel toward each other at the same speed and collide with each other. What can we conclude? ...
... Two identical carts travel toward each other at the same speed and collide with each other. What can we conclude? ...


Printable Version of this Info
... as possible. For example, if they change the height of the ball release, they can either change it by releasing it further up or down the ruler with the same angle, but that will change the distance it rolls on the ruler, or they can change the angle but release the ball at approximately the same he ...
... as possible. For example, if they change the height of the ball release, they can either change it by releasing it further up or down the ruler with the same angle, but that will change the distance it rolls on the ruler, or they can change the angle but release the ball at approximately the same he ...
Chapter 7
... travels along the circumference of a circle. This is used to measure the speed of a orbiting satellite or a rock tied to the end of a string. ...
... travels along the circumference of a circle. This is used to measure the speed of a orbiting satellite or a rock tied to the end of a string. ...



Turntables PPT - Physics of Theatre Home
... of Inertia Turntable: r = 6 ft m = 400 lb/32.2 ft/s2 = 12.4 slug Itt = ½ m r2 = 223.2 slug.ft2 Wall: a = 12.5 ft, b = 2 ft m = 300 lb/32.2 ft/s2 = 9.3 slug Iwall = 1/12 m (a2 + b2) = 124.2 slug.ft2 Box: a = 2 ft, b = 1 ft, d = 4 ft m = 100 lb/32.2 ft/s2 = 3.1 slug Ibox = 1/12 m (a2 + b2) + m d2 = 50 ...
... of Inertia Turntable: r = 6 ft m = 400 lb/32.2 ft/s2 = 12.4 slug Itt = ½ m r2 = 223.2 slug.ft2 Wall: a = 12.5 ft, b = 2 ft m = 300 lb/32.2 ft/s2 = 9.3 slug Iwall = 1/12 m (a2 + b2) = 124.2 slug.ft2 Box: a = 2 ft, b = 1 ft, d = 4 ft m = 100 lb/32.2 ft/s2 = 3.1 slug Ibox = 1/12 m (a2 + b2) + m d2 = 50 ...


Newton`s Laws of Motion
... experienced by the club head is equal to the force experienced by the golf ball. Most observers of this collision have difficulty with this concept because they perceive the high speed given to the ball as the result of the collision. They are not observing unequal forces upon the ball and club head ...
... experienced by the club head is equal to the force experienced by the golf ball. Most observers of this collision have difficulty with this concept because they perceive the high speed given to the ball as the result of the collision. They are not observing unequal forces upon the ball and club head ...





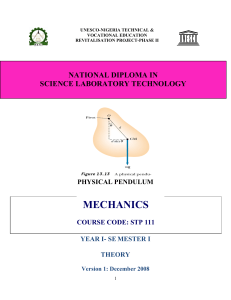
13.11. Visualize: Solve: Torque by a force is defined as τ = Frsinφ
... 13.54. Model: The object is a rigid rotating body. Assume the masses m1 and m2 are small and the rod is thin. Visualize: Please refer to P13.54. Solve: The moment of inertia of the object is the sum of the moment of inertia of the rod, mass m1, and mass m2. Using Table 13.3 for the moment of inertia ...
... 13.54. Model: The object is a rigid rotating body. Assume the masses m1 and m2 are small and the rod is thin. Visualize: Please refer to P13.54. Solve: The moment of inertia of the object is the sum of the moment of inertia of the rod, mass m1, and mass m2. Using Table 13.3 for the moment of inertia ...

Higher ODU Printed Notes
... The mass in kg of the two vehicles will be measured with a digital balance. The computer will be set to measure the vehicles velocity (note direction!!!) before and after a collision. The second vehicle will initially be at rest. This will allow the momentum before and after the collision to be cal ...
... The mass in kg of the two vehicles will be measured with a digital balance. The computer will be set to measure the vehicles velocity (note direction!!!) before and after a collision. The second vehicle will initially be at rest. This will allow the momentum before and after the collision to be cal ...

Notes on Vector Addition
... The strategy is to find the X and Y components of all of the vectors being added. Then, add up all of the X components to find the X component of the resultant. Add up all of the Y components to find the Y component of the resultant. THEN you can use the Pythagorean Theorem and tangent of to find ...
... The strategy is to find the X and Y components of all of the vectors being added. Then, add up all of the X components to find the X component of the resultant. Add up all of the Y components to find the Y component of the resultant. THEN you can use the Pythagorean Theorem and tangent of to find ...


Relativistic angular momentum

""Angular momentum tensor"" redirects to here.In physics, relativistic angular momentum refers to the mathematical formalisms and physical concepts that define angular momentum in special relativity (SR) and general relativity (GR). The relativistic quantity is subtly different from the three-dimensional quantity in classical mechanics.Angular momentum is a dynamical quantity derived from position and momentum, and is important; angular momentum is a measure of an object's ""amount of rotational motion"" and resistance to stop rotating. Also, in the same way momentum conservation corresponds to translational symmetry, angular momentum conservation corresponds to rotational symmetry – the connection between symmetries and conservation laws is made by Noether's theorem. While these concepts were originally discovered in classical mechanics – they are also true and significant in special and general relativity. In terms of abstract algebra; the invariance of angular momentum, four-momentum, and other symmetries in spacetime, are described by the Poincaré group and Lorentz group.Physical quantities which remain separate in classical physics are naturally combined in SR and GR by enforcing the postulates of relativity, an appealing characteristic. Most notably; space and time coordinates combine into the four-position, and energy and momentum combine into the four-momentum. These four-vectors depend on the frame of reference used, and change under Lorentz transformations to other inertial frames or accelerated frames.Relativistic angular momentum is less obvious. The classical definition of angular momentum is the cross product of position x with momentum p to obtain a pseudovector x×p, or alternatively as the exterior product to obtain a second order antisymmetric tensor x∧p. What does this combine with, if anything? There is another vector quantity not often discussed – it is the time-varying moment of mass (not the moment of inertia) related to the boost of the centre of mass of the system, and this combines with the classical angular momentum to form an antisymmetric tensor of second order. For rotating mass–energy distributions (such as gyroscopes, planets, stars, and black holes) instead of point-like particles, the angular momentum tensor is expressed in terms of the stress–energy tensor of the rotating object.In special relativity alone, in the rest frame of a spinning object; there is an intrinsic angular momentum analogous to the ""spin"" in quantum mechanics and relativistic quantum mechanics, although for an extended body rather than a point particle. In relativistic quantum mechanics, elementary particles have spin and this is an additional contribution to the orbital angular momentum operator, yielding the total angular momentum tensor operator. In any case, the intrinsic ""spin"" addition to the orbital angular momentum of an object can be expressed in terms of the Pauli–Lubanski pseudovector.