
BALANCE PRINCIPLES
... This chapter presents the basic dynamical equations for continuum mechanics and some key inequalities from thermodynamics. The latter may be used to give functional form to the second Piola-Kirchhoff stress tensor-a fundamental ingredient in the dynamical equations. The study of this functional form ...
... This chapter presents the basic dynamical equations for continuum mechanics and some key inequalities from thermodynamics. The latter may be used to give functional form to the second Piola-Kirchhoff stress tensor-a fundamental ingredient in the dynamical equations. The study of this functional form ...

Chapter 1 Rotation of an Object About a Fixed Axis
... through the center of mass is ICM . Now suppose we displace the axis parallel to itself by a distance D. This situation is shown in Fig. 1.4. The moment of inertia of the object about the new axis will have a new value I, given by I = ICM + MD2 ...
... through the center of mass is ICM . Now suppose we displace the axis parallel to itself by a distance D. This situation is shown in Fig. 1.4. The moment of inertia of the object about the new axis will have a new value I, given by I = ICM + MD2 ...







Describing Dark Matter with Effective Operators
... scale down to the hadronic scale. • In the process, new interactions may be induced at loop-level, leading to additional operators, which are absent (or small) at the TEV scale. • A full calculation should include the mixing of all relevant effective operators under Renormalisation Group evolution. ...
... scale down to the hadronic scale. • In the process, new interactions may be induced at loop-level, leading to additional operators, which are absent (or small) at the TEV scale. • A full calculation should include the mixing of all relevant effective operators under Renormalisation Group evolution. ...




Prediction of Attenuation coefficient of X band microwave
... From above discussion it is concluded that attenuation coefficient of microwave signal depend upon frequency, visibility, and particle radii. Attenuation coefficient of microwave signal increases with frequency due to increase in, for zero visibility the medium is almost completely packed with sand, ...
... From above discussion it is concluded that attenuation coefficient of microwave signal depend upon frequency, visibility, and particle radii. Attenuation coefficient of microwave signal increases with frequency due to increase in, for zero visibility the medium is almost completely packed with sand, ...
Vectors and Scalars
... Multiplying a vector, v by a scalar, k, creates a new vector with the magnitude k times as large. The direction of the vector does not change unless the scalar is negative which would then make the new direction opposite to the original. Multiplying by zero creates a vector of magnitude 0. ...
... Multiplying a vector, v by a scalar, k, creates a new vector with the magnitude k times as large. The direction of the vector does not change unless the scalar is negative which would then make the new direction opposite to the original. Multiplying by zero creates a vector of magnitude 0. ...


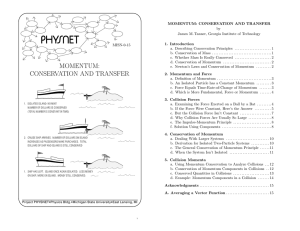
Module P2.5 Momentum and collisions
... Equation 2 is a vector equation and so represents the three equations, one for each of the three components of force: dpy dp dp Fx = x , Fy = , Fz = z (2a) dt dt dt We now have two forms of Newton’s second law when m is constant: dp F = ma4and4 F = dt Faced with two ways of expressing Newton’s secon ...
... Equation 2 is a vector equation and so represents the three equations, one for each of the three components of force: dpy dp dp Fx = x , Fy = , Fz = z (2a) dt dt dt We now have two forms of Newton’s second law when m is constant: dp F = ma4and4 F = dt Faced with two ways of expressing Newton’s secon ...