
L3 ROTATIONAL MOTION
... As with any form of motion energy must be involved and obviously rotational motion is no exception. Place a boulder up a hill and let it go. If you are coming up the hill in the path of the boulder you will get squished!!! Meeting the boulder at the bottom compared to halfway up or at the top leads ...
... As with any form of motion energy must be involved and obviously rotational motion is no exception. Place a boulder up a hill and let it go. If you are coming up the hill in the path of the boulder you will get squished!!! Meeting the boulder at the bottom compared to halfway up or at the top leads ...




Momentum and Impulse
... The cue ball collides with the 8-ball which is initially at rest. Is it possible for both the cue ball and 8-ball to be at rest immediately after the collision? The conservation of momentum (Δp = 0) prohibits this from happening. If the system (the cue ball and the 8-ball) had momentum before the c ...
... The cue ball collides with the 8-ball which is initially at rest. Is it possible for both the cue ball and 8-ball to be at rest immediately after the collision? The conservation of momentum (Δp = 0) prohibits this from happening. If the system (the cue ball and the 8-ball) had momentum before the c ...




Mathematics 206 Solutions for HWK 13a Section 4.3 p184 Section
... Section 4.3 p184 Problem 23. (Guided Proof.) Let W be a nonempty subset W of a vector space V . Prove that W is a subspace of V iff ax + by ∈ W for all scalars a and b and all vectors x, y ∈ W . Proof. (=⇒). Assume that W is a subspace of V . Then assume that x, y ∈ W and a, b ∈ R. As a subspace, W ...
... Section 4.3 p184 Problem 23. (Guided Proof.) Let W be a nonempty subset W of a vector space V . Prove that W is a subspace of V iff ax + by ∈ W for all scalars a and b and all vectors x, y ∈ W . Proof. (=⇒). Assume that W is a subspace of V . Then assume that x, y ∈ W and a, b ∈ R. As a subspace, W ...

Physics1
... from the larger drum. The cylinder is free to rotate around the central axis shown in the drawing. A rope wrapped around the drum, which has radius R1 = 1.0 m , exerts a force F1 = 5.0 N to the right on the cylinder. A rope wrapped around the core, which has radius R2 = 0.50 m, exerts a force F2 = 1 ...
... from the larger drum. The cylinder is free to rotate around the central axis shown in the drawing. A rope wrapped around the drum, which has radius R1 = 1.0 m , exerts a force F1 = 5.0 N to the right on the cylinder. A rope wrapped around the core, which has radius R2 = 0.50 m, exerts a force F2 = 1 ...

Least Squares Fitting of Ellipses
... The next step is to extract geometric parameters of the best- tting ellipse from the algebraic equation (1). We rst check the existence of a tilt, which is present only if the coe cient B in (1) is non-zero. If that was the case, we rst need to eliminate the tilt of the ellipse. Denoting the tilt ...
... The next step is to extract geometric parameters of the best- tting ellipse from the algebraic equation (1). We rst check the existence of a tilt, which is present only if the coe cient B in (1) is non-zero. If that was the case, we rst need to eliminate the tilt of the ellipse. Denoting the tilt ...

posted
... vA2 x vB 2 x 300 m/s 2 320 m/s The 0.150 kg glider (A) is moving to the left at 3.20 m/s and the 0.300 kg glider (B) is moving to the left at 0.20 m/s. EVALUATE: We can use our v A2 x and vB 2 x to show that Px is constant and K1 K2 IDENTIFY: When the spring is compressed the maximum amou ...
... vA2 x vB 2 x 300 m/s 2 320 m/s The 0.150 kg glider (A) is moving to the left at 3.20 m/s and the 0.300 kg glider (B) is moving to the left at 0.20 m/s. EVALUATE: We can use our v A2 x and vB 2 x to show that Px is constant and K1 K2 IDENTIFY: When the spring is compressed the maximum amou ...

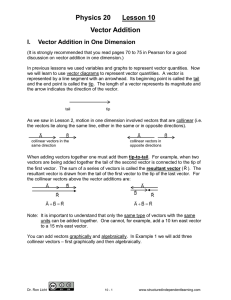
Physics 20 Lesson 10 - Structured Independent Learning
... trigonometric functions to solve them. (For a review of the Pythagorean formula and trigonometric functions see the Review of Trigonometric Functions section below.) In addition, when a vector has a direction which is not directly north, south, east or west we require a way to communicate the dire ...
... trigonometric functions to solve them. (For a review of the Pythagorean formula and trigonometric functions see the Review of Trigonometric Functions section below.) In addition, when a vector has a direction which is not directly north, south, east or west we require a way to communicate the dire ...





kinematics of rotation of rigid bodies
... Angular momentum and torque are really vector quantities. Their direction is always along the axis of rotation. For two dimensional motion they always point either out of the page (if they are positive) or into the page (if they are negative). Thus we don't need to explicitly consider their vector p ...
... Angular momentum and torque are really vector quantities. Their direction is always along the axis of rotation. For two dimensional motion they always point either out of the page (if they are positive) or into the page (if they are negative). Thus we don't need to explicitly consider their vector p ...




