





MAE 241 –Statics Fall 2006 Jacky C. Prucz
... SI system: In the SI system of units, mass is a base unit and weight is a derived unit. Typically, mass is specified in kilograms(kg), and weight is calculated from W = mg. If the gravitational acceleration (g) is specified in units of m/s2, then the weight is expressed in newtons (N). On the eart ...
... SI system: In the SI system of units, mass is a base unit and weight is a derived unit. Typically, mass is specified in kilograms(kg), and weight is calculated from W = mg. If the gravitational acceleration (g) is specified in units of m/s2, then the weight is expressed in newtons (N). On the eart ...





here.
... reproduces Newton’s equation. We denote coordinates by q rather than x to emphasize they need not be Cartesian coordinates. Let us briefly describe how Lagrange’s equations arise. • We consider the problem of determining the classical trajectory that a particle must take if it was at qi at ti and q ...
... reproduces Newton’s equation. We denote coordinates by q rather than x to emphasize they need not be Cartesian coordinates. Let us briefly describe how Lagrange’s equations arise. • We consider the problem of determining the classical trajectory that a particle must take if it was at qi at ti and q ...

247
... block of the density matrix, and in particular the core–virtual block, a mass weighting scheme is introduced here by genគ . 共Note eralizing the fictitious mass to a matrix of masses, that the fictitious mass matrix is represented by the symbol គ , whereas its scalar counterpart, used earlier in t ...
... block of the density matrix, and in particular the core–virtual block, a mass weighting scheme is introduced here by genគ . 共Note eralizing the fictitious mass to a matrix of masses, that the fictitious mass matrix is represented by the symbol គ , whereas its scalar counterpart, used earlier in t ...

1101 Lab 8 - Oscillations
... over a cliff from a long rope that is tied to the evil villain, who is on the ice-covered ledge of the cliff. The villain's elastic parachute line is tangled in a tree located several feet from the edge of the cliff. Bruce and the villain are in simple harmonic motion. At the top of his motion, Bruc ...
... over a cliff from a long rope that is tied to the evil villain, who is on the ice-covered ledge of the cliff. The villain's elastic parachute line is tangled in a tree located several feet from the edge of the cliff. Bruce and the villain are in simple harmonic motion. At the top of his motion, Bruc ...

Chapter 13 Simple Harmonic Motion
... that the restoring force is pulling the mass back toward its equilibrium position. At the equilibrium position x = 0, a = 0, and F = 0, but v has its maximum velocity of −ωA toward the left. As x goes to negative values, the force and the acceleration become positive, slowing down the motion to the ...
... that the restoring force is pulling the mass back toward its equilibrium position. At the equilibrium position x = 0, a = 0, and F = 0, but v has its maximum velocity of −ωA toward the left. As x goes to negative values, the force and the acceleration become positive, slowing down the motion to the ...

33 Special Relativity - Farmingdale State College
... Figure 33.4 A linearly accelerated frame of reference. right. An observer on the shore sees the projectile motion as in figure 33.4(a). The observed motion of the projectile is the same as in figure 33.2(b), but now the observer on the shore sees the rock fall into the water behind the boat rather t ...
... Figure 33.4 A linearly accelerated frame of reference. right. An observer on the shore sees the projectile motion as in figure 33.4(a). The observed motion of the projectile is the same as in figure 33.2(b), but now the observer on the shore sees the rock fall into the water behind the boat rather t ...
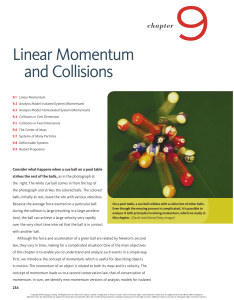
chap 6 momentum
... Conservation of Momentum This means that the momentum doesn’t change. Recall that F t = (mv) In this equation, F is the "external force". Internal forces cannot cause a change in momentum. ...
... Conservation of Momentum This means that the momentum doesn’t change. Recall that F t = (mv) In this equation, F is the "external force". Internal forces cannot cause a change in momentum. ...


Center of mass

In physics, the center of mass of a distribution of mass in space is the unique point where the weighted relative position of the distributed mass sums to zero or the point where if a force is applied causes it to move in direction of force without rotation. The distribution of mass is balanced around the center of mass and the average of the weighted position coordinates of the distributed mass defines its coordinates. Calculations in mechanics are often simplified when formulated with respect to the center of mass.In the case of a single rigid body, the center of mass is fixed in relation to the body, and if the body has uniform density, it will be located at the centroid. The center of mass may be located outside the physical body, as is sometimes the case for hollow or open-shaped objects, such as a horseshoe. In the case of a distribution of separate bodies, such as the planets of the Solar System, the center of mass may not correspond to the position of any individual member of the system.The center of mass is a useful reference point for calculations in mechanics that involve masses distributed in space, such as the linear and angular momentum of planetary bodies and rigid body dynamics. In orbital mechanics, the equations of motion of planets are formulated as point masses located at the centers of mass. The center of mass frame is an inertial frame in which the center of mass of a system is at rest with respect to the origin of the coordinate system.