



















1. General Vector Spaces 1.1. Vector space axioms. Definition 1.1
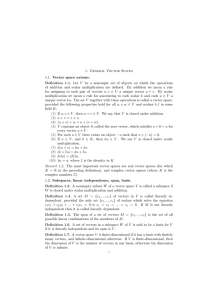
... Definition 1.3. A nonempty subset W of a vector space V is called a subspace if W is closed under scalar multiplication and addition. Definition 1.4. A set M = {v1 , ..., vs } of vectors in V is called linearly independent, provided the only set {c1 , ..., cs } of scalars which solve the equation c1 ...
... Definition 1.3. A nonempty subset W of a vector space V is called a subspace if W is closed under scalar multiplication and addition. Definition 1.4. A set M = {v1 , ..., vs } of vectors in V is called linearly independent, provided the only set {c1 , ..., cs } of scalars which solve the equation c1 ...


Notes on the Dual Space Let V be a vector space over a field F. The
... There is a canonical mapping R of a vector space V into its second dual V ∗∗ = (V ∗ )∗ defined by R(v) = v ∗∗ where v ∗∗ (φ) = φ(v). The proof of the linearity of v ∗∗ and R are left to the reader. If R(v) = 0 we have φ(v) = 0 for all φ ∈ V ∗ . If v 6= 0 then it can be completed to a basis B of V . ...
... There is a canonical mapping R of a vector space V into its second dual V ∗∗ = (V ∗ )∗ defined by R(v) = v ∗∗ where v ∗∗ (φ) = φ(v). The proof of the linearity of v ∗∗ and R are left to the reader. If R(v) = 0 we have φ(v) = 0 for all φ ∈ V ∗ . If v 6= 0 then it can be completed to a basis B of V . ...
