

Statistical Behavior of the Eigenvalues of Random Matrices
... The second condition is intended mainly to simplify things, but the first is absolutely essential, if we are to deal with random matrix eigenvalues. P (H) must depend on abstract linear transforms, irrespective of basis, because these abstract transforms determine the eigenvalues. So far we have not ...
... The second condition is intended mainly to simplify things, but the first is absolutely essential, if we are to deal with random matrix eigenvalues. P (H) must depend on abstract linear transforms, irrespective of basis, because these abstract transforms determine the eigenvalues. So far we have not ...




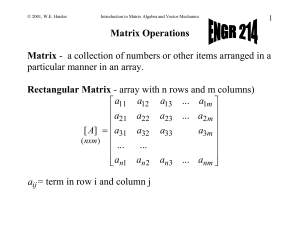
Review of Matrix Algebra
... diagonal (diagonal running from upper left to lower right) if aij a ji . For example, for a (3x3), we ...
... diagonal (diagonal running from upper left to lower right) if aij a ji . For example, for a (3x3), we ...













Solutions To Topic 21(slides)
... Notice that all points on the line 2x + 3y = 6 satisfy this inequality. This line cuts the plane in half. One half contains all points (x, y) with 2x + 3y > 6 and the other half contains all points with 2x + 3y < 6. To find which half is which, we need only check one point on one side of the line. ...
... Notice that all points on the line 2x + 3y = 6 satisfy this inequality. This line cuts the plane in half. One half contains all points (x, y) with 2x + 3y > 6 and the other half contains all points with 2x + 3y < 6. To find which half is which, we need only check one point on one side of the line. ...