
Saturated Sets in Fuzzy Topological Spaces
... The concept of fuzzy subsets has been introduced by Zadeh (1965) [16]. Zadeh defined the fuzzy subset A of X as a function from X into the unit interval of real numbers [0,1]. Goguen (1967) generalized the definition of the fuzzy subset, introducing the L -fuzzy subset of X as a function A ∶ X → L, ...
... The concept of fuzzy subsets has been introduced by Zadeh (1965) [16]. Zadeh defined the fuzzy subset A of X as a function from X into the unit interval of real numbers [0,1]. Goguen (1967) generalized the definition of the fuzzy subset, introducing the L -fuzzy subset of X as a function A ∶ X → L, ...

Power Domains and Iterated Function Systems
... Codes: 6475 Signs: 4316 . Length: 60 pic 11 pts, 257 mm ...
... Codes: 6475 Signs: 4316 . Length: 60 pic 11 pts, 257 mm ...

Five Lectures on Dynamical Systems
... x, T (x), T 2 (x), ...., e.g. x → 2x How can we describe the global behaviour of the dynamical system? “attractors”, their “topology” and “geometry”? Examples: - Rotations of the circle: deterministic, if we understand one orbit then we understand any other orbits. - The doubling map: example of a “ ...
... x, T (x), T 2 (x), ...., e.g. x → 2x How can we describe the global behaviour of the dynamical system? “attractors”, their “topology” and “geometry”? Examples: - Rotations of the circle: deterministic, if we understand one orbit then we understand any other orbits. - The doubling map: example of a “ ...

SYMBOLIC DYNAMICS Contents Introduction 1 1. Dynamics 2 1.1
... Furthermore, since L is symmetric, by the spectral theorem, the eigenvectors are orthogonal. This is obvious in Figure 1. We can also use our orthogonal eigenbasis to change the fundamental region of our geometric picture. That is, instead of thinking of FL acting on the unit square, we can construc ...
... Furthermore, since L is symmetric, by the spectral theorem, the eigenvectors are orthogonal. This is obvious in Figure 1. We can also use our orthogonal eigenbasis to change the fundamental region of our geometric picture. That is, instead of thinking of FL acting on the unit square, we can construc ...

http://www.math.grin.edu/~chamberl/conference/papers/monks.pdf
... x 2 X then h Of (x) = Og (h (x)) : (d) Every monic morphism is injective. (e) Every epic morphism is surjective. (f) There exist injections which are not sections. (g) There exist surjections which are not retractions. (h) Every bimorphism is an isomorphism. (i) Dyn (;; ³ ;) is an ´initial object. ( ...
... x 2 X then h Of (x) = Og (h (x)) : (d) Every monic morphism is injective. (e) Every epic morphism is surjective. (f) There exist injections which are not sections. (g) There exist surjections which are not retractions. (h) Every bimorphism is an isomorphism. (i) Dyn (;; ³ ;) is an ´initial object. ( ...

Shifts as Dynamical Systems
... Example 2 (Convergence in shift spaces). From our metric above, we see that a sequence of points in a shift space converges exactly when, for each k ≥ 0, the central (2k + 1)−blocks spabilize starting at some element of the sequence. More precisely, if X is a shift space, and x(n) be a sequence in X ...
... Example 2 (Convergence in shift spaces). From our metric above, we see that a sequence of points in a shift space converges exactly when, for each k ≥ 0, the central (2k + 1)−blocks spabilize starting at some element of the sequence. More precisely, if X is a shift space, and x(n) be a sequence in X ...

New chaotic planar attractors from smooth zero entropy interval maps
... σf (x , x , x , . . .) = f (x ), f (x ), f (x ), . . . = f (x ), x , x , . . . . The shift homeomorphism σf preserves topological entropy of f , as well as many other dynamical properties such as existence of periodic orbits of given period, shadowing property, and topological mixing []. ...
... σf (x , x , x , . . .) = f (x ), f (x ), f (x ), . . . = f (x ), x , x , . . . . The shift homeomorphism σf preserves topological entropy of f , as well as many other dynamical properties such as existence of periodic orbits of given period, shadowing property, and topological mixing []. ...

Let X be a metric space and R the additive group of the reals
... Proof. Let x ∈ X. Suppose that γ(x) is not a one-to-one image of R, i.e., there are s0 and s00 in R, with s0 > s00 such that ϕ(s0, x) = ϕ(s00, x). Then ϕ(t, x) = x, where t = s0 − s00. Let t0 = inf{t > 0 | ϕ(t, x) = x}. Then either ϕ(t0, x) = x or there is a sequence (tn)tn>t0 convergent to t0 such ...
... Proof. Let x ∈ X. Suppose that γ(x) is not a one-to-one image of R, i.e., there are s0 and s00 in R, with s0 > s00 such that ϕ(s0, x) = ϕ(s00, x). Then ϕ(t, x) = x, where t = s0 − s00. Let t0 = inf{t > 0 | ϕ(t, x) = x}. Then either ϕ(t0, x) = x or there is a sequence (tn)tn>t0 convergent to t0 such ...
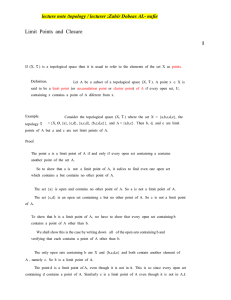
Limit Points and Closure
... X \ A. Then X \ A is an open set containing the limit point p of A. Therefore X \ A contains an element of A. This is clearly false and so we have a contradiction to our supposition. Therefore every limit point of A must belong to A. Conversely, assume that A contains all of its limit points. For ea ...
... X \ A. Then X \ A is an open set containing the limit point p of A. Therefore X \ A contains an element of A. This is clearly false and so we have a contradiction to our supposition. Therefore every limit point of A must belong to A. Conversely, assume that A contains all of its limit points. For ea ...

flows - IHES
... This paper carries over to flows results previously obtained for diffeomorphisms with regard to equilibrium states [6, 7, 24] and attractors [24]. For Anosov flows (A = M) the measure ~% has been studied in [9, 16, 17, 20, 25, 26-] and the theory of Gibbs states (a slightly different formalism from ...
... This paper carries over to flows results previously obtained for diffeomorphisms with regard to equilibrium states [6, 7, 24] and attractors [24]. For Anosov flows (A = M) the measure ~% has been studied in [9, 16, 17, 20, 25, 26-] and the theory of Gibbs states (a slightly different formalism from ...

p. 1 Math 490 Notes 7 Zero Dimensional Spaces For (SΩ,τo
... Proof : Define B = {x ∈ X ¯ ∀ nbhds U of x, A ∩ U 6= φ}. First note that A ⊆ B, since x ∈ A ⇒ (x ∈ U ∩ A for all nbhds U of x) ⇒ (U ∩ A 6= φ for all nbhds U of x) ⇒ x ∈ B. Now, if we can show that B is closed, we’ll have A ⊆ B, since A is the smallest closed set containing A. So, let y ∈ X − B. Then ...
... Proof : Define B = {x ∈ X ¯ ∀ nbhds U of x, A ∩ U 6= φ}. First note that A ⊆ B, since x ∈ A ⇒ (x ∈ U ∩ A for all nbhds U of x) ⇒ (U ∩ A 6= φ for all nbhds U of x) ⇒ x ∈ B. Now, if we can show that B is closed, we’ll have A ⊆ B, since A is the smallest closed set containing A. So, let y ∈ X − B. Then ...

p. 1 Math 525 Notes on section 17 Isolated points In general, a point
... Note that A can be obtained by adding to A either its boundary points or its limit points, though the notions of boundary points and limit points are generally different. Convergence, and Hausdorff and T1 Spaces In a topological space (X, τ ), we say a countable sequence of points {xn } converges (o ...
... Note that A can be obtained by adding to A either its boundary points or its limit points, though the notions of boundary points and limit points are generally different. Convergence, and Hausdorff and T1 Spaces In a topological space (X, τ ), we say a countable sequence of points {xn } converges (o ...
Dynamical Models of Sentence Processing
... using localist representations. These models had many of the properties we make use of here. For example: 1) Competition between simultaneously valid parses increased processing time. 2) Magnitudes of real-valued weights reflected contrasts in frequency and thus gave rise to biases in favor of more ...
... using localist representations. These models had many of the properties we make use of here. For example: 1) Competition between simultaneously valid parses increased processing time. 2) Magnitudes of real-valued weights reflected contrasts in frequency and thus gave rise to biases in favor of more ...

I - Mathphysics.com
... Another way in which discrete-time dynamical systems arise is via a Poincaré section. Instead of evaluating a differentiable dynamical system at equal time intervals, we may evaluate it whenever the trajectory passes through a distinguished submanifold (surface) in S. For example, a planar pendulum ...
... Another way in which discrete-time dynamical systems arise is via a Poincaré section. Instead of evaluating a differentiable dynamical system at equal time intervals, we may evaluate it whenever the trajectory passes through a distinguished submanifold (surface) in S. For example, a planar pendulum ...

Dynamical systems
... A fixed point is a special point of the dynamical system which does not change in time. It is also called an equilibrium, steady-state, or singular point of the system. If a system is defined by an equation dx/dt = f(x), then the fixed point x~ can be found by examining of condition f(x~)=0. We need ...
... A fixed point is a special point of the dynamical system which does not change in time. It is also called an equilibrium, steady-state, or singular point of the system. If a system is defined by an equation dx/dt = f(x), then the fixed point x~ can be found by examining of condition f(x~)=0. We need ...

Dynamical systems
... A fixed point is a special point of the dynamical system which does not change in time. It is also called an equilibrium, steady-state, or singular point of the system. If a system is defined by an equation dx/dt = f(x), then the fixed point x~ can be found by examining of condition f(x~)=0. We need ...
... A fixed point is a special point of the dynamical system which does not change in time. It is also called an equilibrium, steady-state, or singular point of the system. If a system is defined by an equation dx/dt = f(x), then the fixed point x~ can be found by examining of condition f(x~)=0. We need ...

A FIXED POINT THEOREM FOR BOUNDED
... W0 in its interior. We begin by constructing a manifold with boundary N containing B such that f (N ) ⊂ Int N . Arguing as in the proof of Lemma 5, there is a positive integer n such that for each x in B the set x ∪ f (x) ∪ · · · ∪ f n (x) intersects Sn W0 . Since W0 is forward invariant, it follows ...
... W0 in its interior. We begin by constructing a manifold with boundary N containing B such that f (N ) ⊂ Int N . Arguing as in the proof of Lemma 5, there is a positive integer n such that for each x in B the set x ∪ f (x) ∪ · · · ∪ f n (x) intersects Sn W0 . Since W0 is forward invariant, it follows ...
Attractor

In the mathematical field of dynamical systems, an attractor is a set of numerical values toward which a system tends to evolve, for a wide variety of starting conditions of the system. System values that get close enough to the attractor values remain close even if slightly disturbed.In finite-dimensional systems, the evolving variable may be represented algebraically as an n-dimensional vector. The attractor is a region in n-dimensional space. In physical systems, the n dimensions may be, for example, two or three positional coordinates for each of one or more physical entities; in economic systems, they may be separate variables such as the inflation rate and the unemployment rate.If the evolving variable is two- or three-dimensional, the attractor of the dynamic process can be represented geometrically in two or three dimensions, (as for example in the three-dimensional case depicted to the right). An attractor can be a point, a finite set of points, a curve, a manifold, or even a complicated set with a fractal structure known as a strange attractor. If the variable is a scalar, the attractor is a subset of the real number line. Describing the attractors of chaotic dynamical systems has been one of the achievements of chaos theory.A trajectory of the dynamical system in the attractor does not have to satisfy any special constraints except for remaining on the attractor, forward in time. The trajectory may be periodic or chaotic. If a set of points is periodic or chaotic, but the flow in the neighborhood is away from the set, the set is not an attractor, but instead is called a repeller (or repellor).