Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power over Ethernet wikipedia , lookup
Wireless power transfer wikipedia , lookup
Electrical ballast wikipedia , lookup
Power factor wikipedia , lookup
Current source wikipedia , lookup
Audio power wikipedia , lookup
Stray voltage wikipedia , lookup
Utility frequency wikipedia , lookup
Power inverter wikipedia , lookup
Surge protector wikipedia , lookup
Electric power system wikipedia , lookup
Opto-isolator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Electrical substation wikipedia , lookup
Distributed generation wikipedia , lookup
Electrification wikipedia , lookup
History of electric power transmission wikipedia , lookup
Voltage optimisation wikipedia , lookup
Three-phase electric power wikipedia , lookup
Power engineering wikipedia , lookup
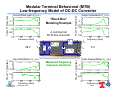
Variable-frequency drive wikipedia , lookup
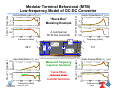
HVDC converter wikipedia , lookup
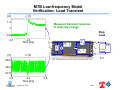
Alternating current wikipedia , lookup
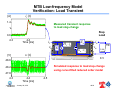
Mains electricity wikipedia , lookup
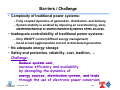
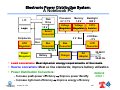
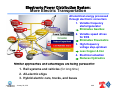
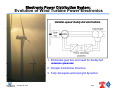
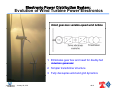
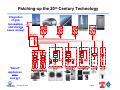
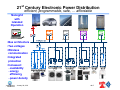
Center for Power Electronics Systems Future Electronic Power Distribution Systems – A contemplative view – Dushan Boroyevich Virginia Tech, Blacksburg, Virginia, USA presentation to IEEE Rock River Valley Section and IEEE Power Electronics Society Chapter Woodward Technology Center Center, Rock Valley College Rockford, IL January 28, 2010 IEEE Guide for Technical Writing Use terminology that is: 1. Common in the engineering and scientific disciplines involved, 2. Standard and widely used in research publications, 3. Generally accepted practice and well understood in IEEE. Some Examples: Phrase: “It is well known …” Meaning: I did not spend the time to find references … Phrase: “It can be easily shown …” Meaning: It is too complex to explain in less than 10 pages … January 28, 2010 db-1 More Examples Phrase: “Correct within an order of magnitude …” Meaning: W Wrong. Phrase: “P li i “Preliminary tests t t were inconclusive.” i l i ” Meaning: It did not work. Phrase: “Typical Typical results are shown … …” Meaning: The best results are shown … or: The only results are shown … January 28, 2010 db-2 Power Electronics: Expanding and Emerging Applications Powering IT Vehicular Power Systems January 28, 2010 Industry Automation Alternative and Distributed Energy Systems db-3 Power Electronics: Expanding and Emerging Applications Most of the Emerging Electric Power Technologies presume Powering Control IT Industry Automation Active Dynamic of the Electric Energy Flow (i e Require the Use of Power Electronics)! (i.e. Electronics)! Vehicular Power Systems January 28, 2010 Alternative and Distributed Energy Systems db-4 Advanced (?) Electrical Power System of a Large Datacom Center • Inefficient • Expensive • Unreliable Generator Very colorful patchwork inherited from last century! Generator Renewable Energy Source DC-AC SWGR SWGR SWGR VSCF Converter MicroTurbine 480 V V, 3Φ AC SWGR 480 V, 3Φ AC SWGR SWGR AC-DC AC DC AC-DC AC DC 480 V, 3Φ AC SWGR ASD SWGR ASD SW G R Battery SWGR Battery DC-AC 24 V, 1Φ AC Emergency Lighting Fire Alarm System Electronic Ballast SWBD LED Digital ICs Mem Central Fan Compressor HVAC System 120 V 1Φ AC PFC Rectifier Isolated POL Converter SWGR Non-Isolated POL Conv. January 28, 2010 .. . Battery 120 V 1Φ AC ASD ASD Motor Motor … Analog ICs LED DC-DC Converter 208 V 3Φ AC ASD AC-DC DC-AC Batteryy Fan Digital ICs Mem AC-DC Front-End ASICs UPS .. . Server Non-Isolated POL Conv. db-5 Motor Pumps and Fans 48 V DC .. . ASICs μP Motor Computer Power System 120 V 1Φ AC PFC Rectifier Fan … Electronic Ballast SWGR – 48 V DC DC-DC C Converter t Electronic Ballast Motor Lighting Telecom Power System Analog Analog ICs 120 V, 1Φ AC DC-AC 120 V, 1Φ AC SW G R μP Barriers / Challenge • Complexity of traditional power systems: – Fully coupled dynamics of generation, distribution, and delivery. – System stability is enabled by imposing an overwhelming, slow, electromechanical or electrochemical d dynamics namics of the so sources. rces • Inadequate controllability of traditional power systems: – Only y ON/OFF control ((difficult energy gy management) g ) – Good at load agglomeration but not at distributed generation • No adequate energy storage • Safety S f t and d protection, t ti reliability, li bilit cost, t tradition, t diti ... Challenge: Reduce system cost, cost increase efficiency and availability by decoupling the dynamics of energy sources sources, distribution system system, and loads through the use of electronic power conversion. January 28, 2010 db-6 Electronic Power Distribution System: A Notebook PC Disk Drive I /O 12 V Logic Processor 0.7-1.7 V Memory 1.8 V Backlight 800 V Voltage Regulator Voltage Regulator CCFL Inverter Boost Converter Peripherals LDO Regulator 3.3 V Bus 5 V Bus Bus Converter Bus Converter 12-16 V Power Management Battery Charger LCD Bias –8V LCD Converter 19 V 90 260 V 90-260 AC Adapter 50-60 Hz • Load converters: Meet dynamic energy requirements of the loads • Source converters: Meet ac line standards; improve battery utilization • Power Distribution Converters: REDUCE COST ! – IIncrease peak-power k efficiency ffi i ⇔ Improve I power density d it – Increase light-load efficiency ⇔ Improve energy efficiency January 28, 2010 db-7 Electronic Power Distribution System: More Electric Transportation All electrical energy processed through electronic converters 1. Variable frequency starter/generator ⇒ Eliminates Gearbox 2. Variable speed drives for ECS ⇒ Eliminates Pneumatics 3. High-frequency voltage step-up/down ⇒ Less Copper & Iron 4. Electrical actuation ⇒ Reduces Hydraulics Similar approaches and advantages are being pursued in: 1. Rail systems and vehicles (for long time) 2. All-electric ships p 3. Hybrid electric cars, trucks, and buses January 28, 2010 db-8 Electronic Power Distribution System: Evolution of Wind Turbine Power Electronics Variable--speed doublyVariable doubly-fed wind turbine 1. Eliminates gear box and need for doubly-fed induction generator 2. Simpler transformer structure 3. Fully decouples wind and grid dynamics January 28, 2010 db-9 Electronic Power Distribution System: Evolution of Wind Turbine Power Electronics Direct geargear-less variablevariable-speed wind turbine 1. Eliminates gear box and need for doubly-fed induction generator 2. Simpler transformer structure 3. Fully decouples wind and grid dynamics January 28, 2010 db-10 Electronic Power Distribution System: Grid-interface for Offshore Wind Farms January 28, 2010 db-11 Electronic Power Distribution System: Grid-interface for Offshore Wind Farms AC Transmission for Offshore Energy Harvesting January 28, 2010 db-12 Electronic Power Distribution System: Grid-interface for Offshore Wind Farms HVDC Transmission for Offshore Energy Harvesting January 28, 2010 db-13 US and Canada Electric Grid Four major independent asynchronous networks, tied together only by DC i t interconnections: ti 1. Eastern Interconnected Network 2. Quebec 3. Texas 4. Western Interconnected Network January 28, 2010 db-14 CPES Sustainable Building Initiative Solar PV Plug-in Plug in Hybrid with Bidirectional Converter January 28, 2010 Entertainment and Data Systems Electric Energy Management Center Smart Appliances pp and Lighting Grid Connection with Bidirectional Converter Wind Turbine Heating, Ventilation Heating Ventilation, and Air Conditioning db-15 Patching-up the 20th Century Technology IIntegration t ti of grid, renewables, and storage g saves money! “Smart” appliances save energy! January 28, 2010 db-16 21st Century Electronic Power Distribution efficient, programmable, safe, … affordable Nanogrid g with Islanded Operation kWh Web-based GUI Time • Bus architecture • Two voltages • Wireless communication • Integrated protection • Increased: - availability - energy efficiency - power density January 28, 2010 db-17 Characteristics of Future Electronic Power Distribution Systems • Power electronics converters are used for: – Source interface – Load interface (only “coffee makers” are still non-electronic loads?) – Power flow control and energy management • Advantages: – – – – High Hi h system t controllability, t ll bilit fl flexibility, ibilit and d responsiveness i Increased availability Reduced size and weight Increased energy efficiency • Issues: – – – – Subsystem interactions (power flow, power quality, EMI, thermal) Complexity (not an issue if dynamics is understood & decoupled) Reliability and lifetime (not protection) Cost (not an issue if system and/or energy costs are reduced) January 28, 2010 db-18 Simplified Power Model of a Regulated DC-DC Converter vi ii Ji Eo Voref Po Ji = η(vi , io ) ⋅ vi [A] Ji Po = vo ⋅ io ≈ Voref ⋅ io 50 [V] Vimax 40 io vo 30 50 40 30 20 Eo 20 10 10 0 Vimin 40 vi 60 80 [V] 100 Static Input Characteristic January 28, 2010 0 voltage regulation mode Voref Iomax current li it limit mode 5 10 io 15 20 [A] 25 Static Output Characteristic db-19 Small-signal Static Model at an Operating Point vi ii Yi Voref Z o io vo slope [A] Ji slope 50 [V] Vimax 40 30 50 40 30 20 Eo 20 10 10 0 Vimin 40 vi 60 80 [V] 100 Static Input Characteristic January 28, 2010 L O A D 0 voltage regulation mode Voref Iomax current li it limit mode 5 10 io 15 20 [A] 25 Static Output Characteristic db-20 Well-known Stability Problem with “Constant Power Loads” vsi isi Ysi Vsoref Z so vli ili Source Converter Yli Vloref Z lo ilo vlo Load Converter • Interface voltage is: Vsoref 1 / Yli vli = ⋅ Vsoref = 1 / Yli + Z so 1 + Z so ⋅ Yli • To T avoid id instability, i t bilit th the return t ratio: ti L ≡ Z so ⋅ Yli must stay away from January 28, 2010 –11 ! db-21 L O A D Synthesis of DC Electronic Power Distribution Systems System Integration is significantly hampered by: • Large number of different components • Many different manufacturers • Lack of knowledge of internal converter structures • Lack of information about internal converter parameters Telecom Power System Analog Analog ICs SWBD LED DC-DC Converter PFC Rectifier Isolated POL Converter SWGR Non-Isolated POL Conv. ASICs Battery .. . SWBD LED DC-DC Converter Non-Isolated Non Isolated POL Conv. Server Fan PFC Rectifier Isolated POL January 28, 2010 μP .. . 48 V DC Analog a og ICs LED .. . PFC Rectifier Fan Digital ICs Mem AC-DC Front-End – 48 V DC Analog Analog ICs Digital ICs PFC Rectifier Analog ICs LED DC-DC Converter .. . ASICs μP 48 V DC – 48 V DC Fan Digital ICs Mem Computer Power System DC-DC Converter db-22 Fan Current Back-gain Hi ( jω ) “Black Box” Modeling Example 0.1 0.01 0 103 104 105 Frequency [rad/s] 48 V Phase e [°] Magnitu ude A commercial 60 W bus converter -200 100 106 ii vi Input Admittance Yi ( jω ) 1 0.01 100 0 103 104 105 Frequency [rad/s] January 28, 2010 106 Yi H i ⋅ io Phase [°°] Magnitude e 1 Output Impedance Zo ( jω ) 1 0.1 0.01 100 0 -100 Zo io vo Go ⋅ vi Measured frequency q y response functions Phase e [°] Magnitu ude Phase [°°] Magnitude e Modular Terminal Behavioral (MTB) Low-frequency Model of DC-DC Converter 104 105 Frequency q y [[rad/s]] 106 8V Audio Susceptibility Go ( jω ) 1 0.1 0.01 0 -200 103 104 105 Frequency [rad/s] db-23 106 Current Back-gain Hi ( jω ) “Black Box” Modeling Example 0.1 0.01 0 103 104 105 Frequency [rad/s] 48 V Phase e [°] Magnitu ude A commercial 60 W bus converter -200 100 106 ii vi Input Admittance Yi ( jω ) 1 Yi H i ⋅ io 103 104 105 Frequency [rad/s] January 28, 2010 106 Output Impedance Zo ( jω ) 1 0.1 0.01 100 0 -100 Zo io vo Go ⋅ vi Measured frequency q y response functions 0.01 100 0 Phase [°°] Magnitude e 1 Curve-fitted, red ced order reduced transfer functions Phase e [°] Magnitu ude Phase [°°] Magnitude e Modular Terminal Behavioral (MTB) Low-frequency Model of DC-DC Converter 104 105 Frequency q y [[rad/s]] 106 8V Audio Susceptibility Go ( jω ) 1 0.1 0.01 0 -200 103 104 105 Frequency [rad/s] db-24 106 MTB Low-frequency Model Verification: Load Transient [A] ii (t) 1.4 Measured transient response to load step step-change change 1 Step Load 0.6 43 4.3 4.4 4 4 Time [ms] ii vi [V] vi (t) Yi H i ⋅ io Zo Go ⋅ vi io vo 48.2 47.8 4.4 Time [ms] January 28, 2010 3.2A 8V 48.6 4.3 7.4A 4.5 db-25 MTB Low-frequency Model Verification: Load Transient [A] ii (t) 1.4 Measured transient response to load step step-change change 1 Step Load 0.6 43 4.3 4.4 4 4 Time [ms] ii vi [V] vi (t) Yi H i ⋅ io Zo Go ⋅ vi io vo 3.2A 8V 48.6 Simulated response to load step-change using curve-fitted reduced order model 48.2 47.8 4.3 7.4A 4.4 Time [ms] January 28, 2010 4.5 db-26 Current Back-gain Hi ( jω ) 0.1 0.2 0.01 0.1 0 0 -200 103 104 105 Frequency [rad/s] Phase [°] Magnittude 48 V 100 Hi (0) 03 0.3 Phase [°] Magnitude e 1 constant power Vimax mode Vimin 30 50 v 60 i [V] 106 ii vi Yi Zo H i ⋅ io 1 [V] 0.01 8 voltage regulation mode 4 100 0 103 Go (0)⋅vi [V] 104 105 Frequency [rad/s] January 28, 2010 106 0 10 i o Iomax Voref current limit mode 20 30 [A] Output Impedance Zo ( jω ) 0.1 0.01 100 0 -100 104 105 Frequency [rad/s] vo Go ⋅ vi Input Admittance Yi ( jω ) 1 io Phase [°] Magnitude Phase [°] Magnitude Fundamental & Low Frequency Model: Nonlinear Behavior of Buck Converter 1 106 8V Audio Susceptibility Go ( jω ) 0.1 0.01 0 -200 103 104 105 Frequency [rad/s] db-27 106 Subsystem Interaction Example – modeling and experiments with commercial converters – 48 V + vsi – Bus Converter ili + vli 8V Load Converter – Z S (s ) YL (s ) 50 0.01 Source Output ZS 1/YL 103 105 F Frequency [rad/s] [ d/ ] January 28, 2010 Imaginarry Mag. [Ω] 1 50% L( jω ) L( s ) ≡ Z S ( s ) ⋅ YL ( s ) p Load Input 3.3 V 100 vli = (1 + Z S ⋅ YL ) -1 ⋅ Gso ⋅ vsi 100 R Load 60% 0 2 -50 -3 -1 0 0 107 -2 -50 0 50 Real 100 db-28 150 Subsystem Interaction Example – modeling and experiments with commercial converters – + vsi 48 V – Bus Converter ili + vli 8V Load Converter – Z S (s ) YL (s ) 100 50 0.01 3 4 Source Output ZS 1/YL 103 105 F Frequency [rad/s] [ d/ ] 4.4 Time [ms] January 28, 2010 Imaginarry Mag. [Ω] Input Curre ent [A] 1 5 50% L( jω ) L( s ) ≡ Z S ( s ) ⋅ YL ( s ) p Load Input 3.3 V 8 Unstable vli = (1 + Z S ⋅ YL ) -1 ⋅ Gso ⋅ vsi 100 7 R Load 60% 0 2 -50 -1 0 0 107 4.8 -3 -2 -50 0 50 Real 100 db-29 150 Subsystem Interaction Example – modeling and experiments with commercial converters – + 48 V vsi – Bus Converter ili + 8 V vli – Z S (s ) YL (s ) C Load 100 μF Converter L( jω ) Mag. [Ω] 1 0.01 Source Output ZS 1/YL 103 105 F Frequency [rad/s] [ d/ ] January 28, 2010 Imaginarry 50 L( s ) ≡ Z S ( s ) ⋅ YL ( s ) p Load Input 3.3 V 100 vli = (1 + Z S ⋅ YL ) -1 ⋅ Gso ⋅ vsi 100 R 0 -3 -1 0 2 -50 0 107 -2 -50 0 50 Real 100 db-30 150 Subsystem Interaction Example – modeling and experiments with commercial converters – + Bus 48 V vsi Converter – ili + 8 V vli – Z S (s ) YL (s ) C Load 100 μF Converter 50 0.01 3 4 Source Output ZS 1/YL 103 105 F Frequency [rad/s] [ d/ ] 4.4 Time [ms] January 28, 2010 50% 100 Imaginarry Mag. [Ω] Input Curre ent [A] 1 5 3.3 V L( jω ) L( s ) ≡ Z S ( s ) ⋅ YL ( s ) p Load Input R 9Stable S vli = (1 + Z S ⋅ YL ) -1 ⋅ Gso ⋅ vsi 100 7 100% 0 -3 2 -50 0 107 4.8 -1 0 -2 -50 0 50 Real 100 db-31 150 Sample Analysis of Stability, Power Quality, Power Management, and Protection Minimum relevant EPDS example: • Two sources • Two loads • DC distribution January 28, 2010 db-32 Power Flow Control & Protection Simulation: Classical System Transient Example + 10 A 380 V dc bus io1 v o1 with 2% short-circuit impedance Battery Source Cu urrent [A] Bus V Voltage [V] io2 10 A Charger 12.3 A 2A Const Const. Load 1 Converter vo2 Load 2 12A Converter 1.2 12 8 io2 4 io1 0 440 vo1 vo2 360 280 0 January 28, 2010 5 Load 2 enters current limit Breaker shutdown time 10 [ms] Ö Source impedance becomes greater than load impedance Ö Small-signal instability with constant-power loads Ö System shut-down 15 db-33 PV Power Flow Control & Protection Simulation: Classical System Transient Example 10 A 380 V dc bus io1 v o1 with 2% short-circuit impedance Battery Load 1 Converter Bus V Voltage [V] 12 8 io2 4 io1 0 440 vo1 vo2 360 280 0 January 28, 2010 5 Breaker shutdown time 10 [ms] 15 io2 Load 2 12A Converter 1.2 Source Cu urrent [A] Source Cu urrent [A] 1 000 μF 1,000 vo2 10 A Charger 12.3 A 2A Const Const. 12 1 000 μF 1,000 Additional Capacitors R d Reduce Source S Impedance I d Load 2 enters current limit io2 8 Ö Source impedance becomes greater than load 4 io1 impedance Ö Small-signal instability with 0 constant-power loads 440 Ö Bus V Voltage [V] + vo1 System shut-down vo2 360 280 0 5 time 10 [ms] db-34 15 PV Power Flow Control & Protection Simulation: Electronic Power Distribution System + Battery Charger / Discharger 10 A io1 v o1 Vo1ref 1 000 μF 1,000 January 28, 2010 Load 1 Converter 380 V dc bus with 2% short-circuit impedance 2A Const Const. vo2 io2 10 A DC-DC Converter Vo2ref 12.3 A Load 2 12A Converter 1.2 1 000 μF 1,000 db-35 PV Power Flow Control & Protection Simulation: Electronic Power Distribution System + Charger / Discharger Battery 10 A io1 v o1 Vo1ref Load 1 Converter 1 000 μF 1,000 380 V dc bus with 2% short-circuit impedance 2A Const Const. vo2 io2 10 A Vo2ref 12.3 A Load 2 12A Converter 1.2 1 000 μF 1,000 Bus V Voltage [V] Source Cu urrent [A] Monitoring and Control 12 io2 8 io1 4 0 440 vo1 vo2 360 280 0 January 28, 2010 5 time 10 [ms] DC-DC Converter 15 db-36 PV Power Flow Control & Protection Simulation: Electronic Power Distribution System + Charger / Discharger Battery Iomax 10 A 10 A io1 v o1 Vo1ref Load 1 Converter 1 000 μF 1,000 380 V dc bus with 2% short-circuit impedance 2A Const Const. vo2 io2 I 10omax A 10 A Vo2ref 12.3 A Load 2 12A Converter 1.2 1 000 μF 1,000 Bus V Voltage [V] Source Cu urrent [A] Monitoring and Control 12 io2 8 io1 4 0 440 vo1 vo2 360 280 0 January 28, 2010 5 time 10 [ms] DC-DC Converter 15 db-37 PV Power Flow Control & Protection Simulation: Electronic Power Distribution System + Charger / Discharger Battery Iomax 10 A 10 A io1 v o1 Vo1ref Load 1 Converter 1 000 μF 1,000 380 V dc bus with 2% short-circuit impedance vo2 io2 I 10omax A 10 A DC-DC Converter Vo2ref 12.3 20 AA 2A Const Const. Load 2 12A Converter 1.2 1 000 μF 1,000 io2 8 io1 4 0 440 vo1 vo2 360 280 0 January 28, 2010 Source Cu urrent [A] 12 5 time 10 [ms] Bus V Voltage [V] Bus V Voltage [V] Source Cu urrent [A] Monitoring and Control 15 12 8 4 0 400 io2 io1 vo2 vo1 200 0 0 System overload! 5 Soft shutdown! time 10 [ms] db-38 15 PV Power Flow Control & Protection Simulation: Electronic Power Distribution System + Charger / Discharger Battery Iomax 10 A 10 A io1 v o1 Vo1ref Load 1 Converter 1 000 μF 1,000 380 V dc bus with 2% short-circuit impedance vo2 io2 I 10omax A 10 A DC-DC Converter Vo2ref 12.3 20 AA 2A Const Const. Load 2 12A Converter 1.2 1 000 μF 1,000 io2 8 i System • NO AC nor DC circuit breakers overload! • NO converter overrating by “>100% for io1 4 8 1-2 sec for breaker clearing” 0 440 0 g of wiring, g contactors, … • NO overrating 400 for short-circuit currents >10x vo1 vo2 360 January 28, 2010 12 Possible Advantages: • NO excess o2 energy storage for stability io1 4 280 0 Source Cu urrent [A] 12 Bus V Voltage [V] Bus V Voltage [V] Source Cu urrent [A] Monitoring and Control vo2 vo1 200 Hence: • Lower cost ? Soft shutdown! • Higher efficiency ? 5 time 10 [ms] 15 0 time 0 5 10 [ms] • Increased availability ? db-39 15 PV Future Building as DC Nanogrid Energy Management Center with Bi-directional Converter kWh Web-based GUI EMC Time • Bi-directional power conversion • Separation of dynamics • Load management • DG management • Data acquisition • Communication, • Islanded operation January 28, 2010 db-40 AC Electronic Power Distribution Systems Generator Generator Renewable Energy Source “Electronic” Electronic only recently in transportation and datacom centers. DC-AC SWGR SWGR SWGR VSCF Converter MicroTurbine 480 V V, 3Φ AC SWGR 480 V, 3Φ AC 480 V, 3Φ AC SWGR ASD SWGR ASD SW G R SW G R Motor 120 V, 1Φ AC Electronic Ballast Electronic Ballast … Lighting Electronic Ballast Central Fan 120 V 1Φ AC Motor Compressor HVAC System ASD ASD Motor Motor ASD … Motor Pumps and Fans MTB Modeling M d li off AC EPDS: EPDS • More difficult due to time-varying nature of steady-state • Large disconnect between system and converter modeling • Use of average models in system analysis is uncommon • “Constant-power loads” are being considered only recently • Small-signal frequency-domain modeling still in development January 28, 2010 db-41 MTB Modeling of Hybrid AC/DC EDPS Components AC to DC Rectifier DC to AC Inverter Active and Passive AC to AC Converter Small-signal Small signal frequency-domain frequency domain modeling exists if AC side is: • Three-phase, 3-wire or 4-wire, Pi & Po • No negativeg and constant zero-sequence q do not vary in steady-state • No (low) harmonic distortion January 28, 2010 db-42 MTB Low-frequency Model of AC-AC Converter a ωi b c Nonlinear AC to AC Converter Model in stationary coordinates r s ωo t • If ACAC-AC equipment is nonlinear (like power converters), it cannot be linearized due to timetime-varying steady steady--state. January 28, 2010 db-43 MTB Low-frequency Model of AC-AC Converter di dc qi 0 Nonlinear AC to AC Converter Model in rotating coordinates do qo dc 0 • If ACAC-AC equipment is nonlinear (like power converters), it cannot be linearized due to timetime-varying steady steady--state. • Change to rotating coordinates in synchronism s nchronism with ith input inp t and output frequencies produces equilibrium steadysteady-states. January 28, 2010 db-44 MTB Low-frequency Model of AC-AC Converter di dc qi 0 Nonlinear AC to AC Converter Model in rotating coordinates do qo dc 0 • If ACAC-AC equipment is nonlinear (like power converters), it cannot be linearized due to timetime-varying steady steady--state. • Change to rotating coordinates in synchronism s nchronism with ith input inp t and output frequencies produces equilibrium steadysteady-states. • SmallSmall-signal frequencyfrequency-domain models are obtained by linearizing at the equilibrium point. January 28, 2010 db-45 MTB Low-frequency Model of AC-AC Converter adi dc ωi b qi c0 Nonlinear AC to AC Converter Model Modelininstationary rotating coordinates dro qso 0t Z dd iid dc ωo iodd • If ACpower converters), vidAC-AC equipment is nonlinear (like G v dd vidsteady it cannot be linearized due to timetime-varying steady--state.od Z dqioq G v Ydd Ytodq viq H dd icoordinates d iq dq i d rotating odd H dq d ioq • Change in synchronism s nchronism with ith input inp t and output frequencies produces equilibrium steadysteady-states. Z qq iiq ioq • SmallSmall-signal frequencyfrequency-domain models are obtained by viq voq linearizing at the equilibrium point. Gqd vid Yqq Yqd vid H qd iod H qqioq Gqq viq Z qd iod Balanced converter model in synchronous dd-q frame(s) January 28, 2010 db-46 MTB Low-frequency Model – DC System vs. AC System – ii vi io DC to DC Converter Single-Input Si l I Single-Output iid vid vo iiqq viq ⎡vo ⎤ ⎡Go ( s) − Z o ( s)⎤ ⎡vi ⎤ ⎢ i ⎥ = ⎢ Y ( s ) H ( s ) ⎥ ⋅ ⎢i ⎥ i ⎣ i⎦ ⎣ i ⎦ ⎣ o⎦ iod AC to AC vod Converter i oqq M liI Multi-Input voq Multi-Output ⎡ v o ⎤ ⎡G o ( s) − Zo ( s)⎤ ⎡ v i ⎤ ⎢ i ⎥ = ⎢ Y ( s) H ( s) ⎥ ⋅ ⎢ i ⎥ i ⎣ i⎦ ⎣ i ⎦ ⎣ o⎦ ⎡ Z dd ( s ) Z dq ( s )⎤ ⎡Gdd ( s ) Gdq ( s )⎤ Zo = ⎢ Go = ⎢ ⎥ ⎥ Z ( s ) Z ( s ) G ( s ) G ( s ) qq qq ⎣ qdd ⎦ ⎣ qdd ⎦ ⎡Ydd ( s ) Ydq ( s )⎤ ⎡ H dd ( s ) H dq ( s )⎤ Yi = ⎢ Hi = ⎢ ⎥ ⎥ ( ) ( s ) ( ) ( s ) Y s Y H s H qq qq ⎣ qd ⎦ ⎣ qd ⎦ January 28, 2010 db-47 AC Subsystem Interaction Example – small-signal and average modeling and simulation – 230 V 400 Hz v li AC Generator 600 V DC bus R St t t Start-up to 135 kW PWM Boost Rectifier Z S (s ) YL (s ) Generalized Nyquist Criterion • Interface voltage is: v li = (I + Z S ⋅ YL ) -1 ⋅ VTh L( s ) = Z S ( s ) ⋅ YL ( s ) eigenvalues ⎡e d ( s ) ⎤ ⎢ e ( s ) ⎥ = eig (L( s ) ) ⎣ q ⎦ must not encircle –1 ! January 28, 2010 Imaginaryy • To avoid instability, the return ratio 4 ed ( jω ) eq ( jω ) 2 0 -3 2 -2 -1 0 0 -4 -2 -1 0 2 4 Real 6 db-48 8 10 AC Subsystem Interaction Example – small-signal and average modeling and simulation – 230 V 400 Hz v li AC Generator 600 V DC bus R PWM Boost Rectifier 9Stable Z S (s ) YL ( s ) Generalized Nyquist Criterion • Interface voltage is: Current [[A] L( s ) = Z S ( s ) ⋅ YL ( s ) 600 eigenvalues 200 id e ( s ) ⎡ d ⎤ ⎢ e ( s ) ⎥ = eig (L( s ) ) iq ⎣ q ⎦ 0 not0.1 0.2 –10.3 must encircle ! Time [s] January 28, 2010 4 Imaginaryy Voltage [V]] V 400 vd -1 300 v li = (I + Z S ⋅ YL ) ⋅ VTh vq • 200 To avoid instability, 100 the return ratio 400 St t t Start-up to 135 kW ed ( jω ) eq ( jω ) 2 0 2 -2 -1 0 0 -4 0.4 -3 -2 -1 0 2 4 Real 6 db-49 8 10 AC Subsystem Interaction Example – small-signal and average modeling and simulation – v li 230 V 400 Hz AC Generator 600 V DC bus R PWM Boost Rectifier St t t Start-up to 180 kW 8 Unstable Z S (s ) YL ( s ) vd 400 300 200 100 4e vq Imaginaryy Current [[A] Voltage [V]] V Generalized Nyquist Criterion id 600 2 0 -2 400 200 0 eq ( jω ) d ( jω ) iq 0.1 January 28, 2010 0.2 0.3 Time [s] -4 0.4 -1 0 2 4 Real 6 db-50 8 10 Advanced Shipboard AC Electric Power Systems Low Voltage AC Distribution Low Voltage AC Bus Voltage DC/AC January 28, 2010 db-51 Advanced Shipboard AC Electric Power Systems Low Voltage AC Distribution Low Voltage AC Bus Voltage DC/AC • IIncrease in i negative ti impedance i d loads produces oscillations. January 28, 2010 db-52 Advanced Shipboard AC Electric Power Systems Low Voltage AC Distribution Low Voltage AC Bus Voltage DC/AC • IIncrease in i negative ti impedance i d loads produces oscillations. • Further increase in negative impedance loads produces instability. January 28, 2010 db-53 Advanced Shipboard AC Electric Power Systems Low Voltage AC Distribution Low Voltage AC Bus Voltage DC/AC Active Filter • IIncrease in i negative ti impedance i d loads produces oscillations. • Further increase in negative impedance loads produces instability. Using g active filter to introduce damping p g at higher g frequencies q decouples the load from source dynamics; thence: reduces complexity and stabilizes network ! January 28, 2010 db-54 Electronic AC Power Distribution System: Fault Handling: One-Phase-to-Ground Short va ia ib vb vc ic With Current Limiting Only Buss Voltage [V] 250 150 50 -50 -150 50 -50 -150 -250 250 250 150 50 -50 -150 150 -250 0.300 0.320 January 28, 2010 0.340 Time [s] 0.360 0.380 With Soft Shut-Down 150 -250 Sou urce Current [A A] Sou urce Current [A A] Buss Voltage [V] 250 150 50 -50 -150 150 -250 0.300 0.320 0.340 Time [s] db-55 0.360 0.380 ¿ Intergrid ? DG = Distributed Generation; mDG = milli DG; μDG = micro DG; nDG = nano DG 2 1 3 1 1 2 4 2 EMC with hierarchical levels: 1, 2, 3, 4, … Energy Management Center (EMC): • Bi-directional p power conversion • Load management (actuation) • DG management (actuation) • Load data acquisition & aggregation • DG data acquisition q & aggregation gg g • Communication, prioritization, prediction • Islanded and dispatchable operation January 28, 2010 EMCs are hierarchical (in acquisition and actuation) and have distributed intelligence with ability to make autonomous decisions based on: • Local conditions, time, and environment, • Top-down commands from system operators, and • Bottom-up demands from the users • Market-based cost / real-time pricing. db-56 Power Electronics Future? • Essential for societal energy needs from: organ implants to … Retinal Implant carbon-free energy J. G. Kassakian IPEC, Niigata, 2005 % of Primary Energy 80% Traditional (Wood, etc.) 60% 40% Coal Wind, PV, other renewables bl Oil O Gas 20% Hydro Nuclear 0% 1850 1875 1900 1925 1950 1975 2000 2025 2050 Courtesy of GE Global Technology Center January 28, 2010 Source: Shell Global Scenarios db-57 Meaning Acknowledgment I would for like to to thank: like thank: My numerous graduate students at CPES for their help in simulations and experiments, and my colleagues Prof Fred Wang and Dr Prof. Dr. Rolando Burgos for many useful discussions. January 28, 2010 db-58 Meaning Acknowledgment I would for like to to thank: like thank: My numerous graduate students at CPES did thehelp work, for all their in simulations and experiments, and my colleagues Prof Fred Wang and Dr Prof. Dr. Rolando Burgos for many useful discussions. explained to me what it means ! January 28, 2010 db-59 Thank You The work and contributions are by many CPES faculty, students, and staff. Many global industrial and US government sponsors of CPES research are gratefully acknowledged. This presentation is a part of Distinguished Lecturer Program organized by IEEE Power Electronics Society. January 28, 2010 db-60