Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
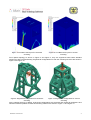
Optimal Design of Stiff Structures subjected to Body Forces P.VasundharaKumari PakeerurajuPodugu Chauhan Rupesh Scientist 'C' Product Design & Engineering Division Defence Research & Development Laboratory (DRDL) Kanchanbagh, Hyderabad-500 058 (India) Scientist 'D' Product Design & Engineering Division Defence Research & Development Laboratory (DRDL) Kanchanbagh, Hyderabad-500 058 (India) Scientist ‘C' Product Design & Engineering Division Defence Research & Development Laboratory (DRDL) Kanchanbagh, Hyderabad-500 058 (India) Keywords: Topology Optimization, Structural optimization, Inertial forces Abstract In this paper, we present a methodology for designing a stiffest structure in presence of body forces to get an optimal material distribution thereby reducing the design cycle time. In general, excessive deformations of the structure will lead to uncertainties in the measurements/outputs of the experiment. This kind of problems is usually dealt by minimizing the mean compliance with volume constraint but without considering the body forces to make the problem convex i.e. to have a unique solution. But, presence of body forces will make the problem difficult for the required convergence. One such application is test fixture for a rocket motor which is made stiffer in presence of body forces and thrust loads. This methodology can be extended to similar structural requirements. In this work, HyperMesh and OptiStruct modules of HyperWorks software are used to get optimal distribution of the material. Introduction Stiff structures are generally preferred for many applications such as bridges, tall buildings, aerospace applications, automobiles etc. Optimal stiff structures are usually obtained using different metrics such as mean compliance (i.e. work done by the external forces), maximum deflection, maximum stress and fundamental frequency. These metrics are used in optimization in the following ways. • Minimize the mean compliance (maximum global stiffness) [1] • Minimize the maximum deflection • Minimize the maximum stress • Maximize the fundamental frequency Among these ways, most commonly followed method is to minimize the mean compliance with a volume constraint. In the absence of density dependent body forces and design dependent loads, this problem is a convex problem i.e. it has a unique solution. But the presence of body forces, for example self-weight and inertial loads, will lead to difficulties such as non-monotonous behaviour of the compliance, possible unconstrained character of the optimum and the parasitic effect for low densities when using the power model (SIMP) [2]. Test fixtures for characterizing rocket motors are generally designed for stiffness such that misalignment due to elastic deflectionis minimized. There can be deviation between the geometric centreline of a rocket nozzle and the true position of the line of thrust of the rocket, called “gas misalignment”, which is to be within permissible limit [3]. It is little difficult to measure the gas misalignment due to lack of adequate equipment. The misalignment is estimated by measuring the side forces. A facility is required to measure thrust line angle and thrust-line displacement with reasonable accuracy. Six-component force is required to define Simulate to Innovate 1 completely the magnitude and position of a force in space. Three types of arrangements can be considered in designing of a thrust-misalignment test setup. 1. The rocket motor is mounted horizontally, as in a conventional static firing, with the thrust reaction and three other reactions horizontal and the remaining two vertical. 2. The rocket motor is mounted vertically with the thrust distributed among three vertical reactions, and the three other reactions in a horizontal plane. 3. The rocket motor mounted vertically, with the thrust reaction in a single force, the remaining five reactions being distributed horizontally in two planes. For the problem at hand, configurations 1 and 3 were considered. Process methodology including optimization problem formulation is detailed in the next section. Subsequently results & discussion and conclusions are explained. Optimization Process Methodology The continuum element method is used in topology optimization. Here the domain is discretized into a number of elements as it is usually done for finite element analysis (FEA). The optimization algorithm decides where to keep material and where not to keep so that a desired objective is met. This is basically a discrete optimization problem. The most common approach to solve this problem by optimization is by replacing the integer variables with continuous variables and then pushing these values to either zero or one by introducing penalty. This is called the Simple Isotropic Material with Penalization (SIMP) approach. The is given by young's modulus of element, is Young's modulus of the base material is fictitious density of element and n is the penalty number Penalty number of 3 generally gives good results using SIMP approach. where Problem formulation The optimization problem can be mathematically defined as Subjected to Where is volume of the structure is the prescribed/specified volume is global stiffness matrix is global displacement vector is force vector due to body forces is force vector due to other loads Simulate to Innovate 2 Solution Methodology Two rocket motor mounting arrangements are studied and their details are explained as follows. Design domains for horizontal and vertical mounting arrangements of the rocket motors are shown in Figure 1 and Figure 2. They are meshed with hexahedral elements. Thrust and side forces are applied and bottom surface is fixed. Acceleration due to gravity is considered. Figure 1: Design domain for horizontal mounting Figure 2: Design domain for Vertical mounting The parameters used in FEA and Optimization are shown in Table 1. Table 1: Parameters used in FEA and Optimization Material Steel Young’s Modulus 200 GPa 3 Density 7800 kg/m Poisson’s Ratio 0.3 As the deflections are small, linear FEA is used to solve the equilibrium equations and the optimization is solved using gradient-based optimization technique available in OptiStruct module of HyperWorks and the results are presented in the next section. Results & Discussions Optimal material distribution for both of the mounting arrangements are shown in Figure 3 and Figure 4. Optimum solution were obtained after 116 and 91 iterations for horizontal and vertical mounting arrangements respectively. Simulate to Innovate 3 Figure 3: Optimal material distribution for horizontal mounting Figure 4: Optimal material distribution for vertical mounting Deformed profile for both the mounting schemes are shown in Figure 5 and Figure 6. Figure 5: Deflection plot for horizontal mounting Figure 6: Deflection plot for vertical mounting Von-Mises stress distribution for both the mounting schemes are shown in Figure 7andFigure 8. Simulate to Innovate 4 Figure 7: Von-Mises stress plot for horizontal mounting Figure 8: Von-Mises stress plot for vertical mounting From optimal topology as shown in Figure 3 and Figure 4, they are engineered with hollow standard sections for ease of manufacturing. Engineered configurations for both the mounting schemes are shown in Figure 9 and Figure 10. Figure 10: Engineered configuration for vertical Figure 9: Engineered configuration for horizontal mounting mounting As the optimal topology is altered, engineered configurations are analysed and verified for deflections and stresses. Deformed profiles for both the mounting schemes are shown in Figure 11 and Figure 12. Simulate to Innovate 5 Figure 11: Deflection plot for horizontal mounting Figure 12: Deflection plot for vertical mounting Von-Mises stress distribution for both the mounting schemes are shown in Figure 13 and Figure 14. Figure 13: Von-Mises stress plot for horizontal Figure 14: Von-Mises stress plot for vertical mounting mounting From the results, it was observed that maximum deflections for both the configurations are within the specified limits (upto 1.0 mm). Simulate to Innovate 6 Benefits Summary In conventional design, finding the material distribution, meeting the design specifications simultaneously, is iterative and time consuming. But the optimization based design hinders the evolution. With this approach, the design cycle time is considerably reduced. Challenges Presence of density dependent body forces will make any optimization algorithm difficult for convergence. Many times the solution diverges [2]. The gradient based optimization algorithm in OptiStruct module of Altair HyperWorks handled the non-convex problem successfully. Conclusions The optimization based design helped in obtaining geometric configuration for both the mounting arrangements. The methodology developed here will be implemented for similar structural requirements. ACKNOWLEDGEMENTS The authors would like to thank Shri A. Balasubramanian, Scientist‘F’, Head PDED and Dr. K Ramesh Kumar, Scientist‘G’, DPTT for motivation and providing the required facilities. REFERENCES [1] [2] [3] [4] [5] Bendsøe, M.P., and Singmund, O., “Topology Optimization – Theory, Methods and Applications”, Springer Verlag, New York, 2003. M. Bruyneel and P. Duysinx, “Note on topology optimization of continuum structures including self-weight”, Structural Multidisciplinary Optimization (2005) 29, pp 245-256. W.L. Rogers, “Determination of thrust alignment in Rocket Engines”, Journal of the American Rocket Society, Vo. 23 No. 6 (1953), pp. 355-359 Peter W Christensen and Anders Klarbring, “An Introduction to Structural Optimization”, Springer Science, 2009 Optistruct Optimization –Analysis, Concept and Optimization , HyperWorks 11.0 Simulate to Innovate 7