Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Battle of the Beams wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Nanogenerator wikipedia , lookup
Rectiverter wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Opto-isolator wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Oscilloscope history wikipedia , lookup
Distributed element filter wikipedia , lookup
Audio crossover wikipedia , lookup
Phase-locked loop wikipedia , lookup
Wave interference wikipedia , lookup
Analogue filter wikipedia , lookup
Mechanical filter wikipedia , lookup
Radio transmitter design wikipedia , lookup
Equalization (audio) wikipedia , lookup
M icrosonics
J. L. Abita and H. K. Charles, J r.
The field of microsonics and in particular
surface acoustic waves ( SAW) has developed rapidly during the past ten years. From
the initial theoretical work on geological
tremors by Lord Rayleigh (1885) and from
the decades of work during this century on
bulk acoustic wave devices for oscillators,
filters, and delay lines, SAW -microsonics
has emerged as a viable working technology
that can delay, shape, limit, mix, and convolve signals over a frequency range from
1 MHz to several GHz. This article presents
the theoretical basis, design development,
and applications theory for SAW devices.
It traces the history of SAW activity at the
Applied Physics Laboratory and identifies
areas of technological potential.
I. Introduction
Microsonics is a science concerned with the
microscopic deformation of an elastic solid by
propagating wavelike disturbances. These disturbances are classified as "bulk waves" if the
motion is confined within the bulk of the medium
or as "surface waves" if the motion is localized on
the boundary or "skin" of the medium. Microwave
acoustics suggests a mechanism similar to that
resulting in sound propagation.
Anyone who has observed ripples on a pond
or geological tremors is familiar with surface wave
phenomena. Similar effects may be created on the
surface of solids by local disturbances that cause
waves to spread throughout the bulk and along the
surface. However, important physical differences
exist between the macroscopic analogies mentioned and what are considered microscopic surface acoustic waves (SAW) on solids.
In contrast to the relatively large displacements
of the medium usually observed in the case of
2
water and seismic waves, the wave motions in the
case of SAW disturbances are microscopic because
the displacements are on an atomic or molecular
scale measured relative to an equilibrium "lattice"
(a fixed reference system and not necessarily a
crystalline structure). The total SAW disturbance
is an integral effect of a large number of small
(atomistic) individual displacements.
The use of SAW at ultrasonic frequencies (10
MHz to 1 GHz) on a special class of materials
called piezoelectrics is giving rise to new families
of devices for storing and recognizing signals,
separating one signal from another, generating
signals, and performing complex mathematical
signal processing functions.
SAW devices are of interest because (a) the
sound wave travels 10 5 times slower than a corresponding electromagnetic wave, (b) the energy
in the wave is available for tapping everywhere
APL Technical Digest
along the device surface, (c) the devices are
compatible with the planar surface processing
methods associated with microcircuit technology,
(d) the power density is high, and (e) the
acoustic losses are low compared to electromagnetic transmission lines of similar delays.
Typical SAW velocities are on the order of
3 X 10 5 cm/ s. Thus a SAW delay of 3 fLS would
require 1 cm of crystal as compared to a kilometer
of air transmission line for the same electromagnetic delay.
An electrical signal is converted to an acoustic
wave by means of an interdigital transducer
(IDT). Its operation is based on the expansion
and contraction of a piezoelectric material (e.g.,
lithium niobate or quartz) in response to an
electric field. The electric field is created by
applying a potential difference to two parallel
interleaved (i.e., interdigital) thin-film metal
electrodes (fingers) deposited on the crystal surface. A time-varying electrical input causes the
crystal to vibrate and generate a sound wave along
the surface. The sound wave may be converted to
an electrical signal (i.e., inverse piezoelectric
effect) at the other end of the crystal using a
second IDT. The finger width and the spacing
between fingers are related to the acoustic wavelength at the frequency of operation.
2. Theory
Analytical Basis
In an attempt to describe geological tremors,
Rayleighl developed an analytical formulation
for waves traversing the free surface of an infinite,
homogeneous, isotropic, elastic half space. In
1967 Viktorov 2 presented a generalized theory
of Rayleigh and Lamb waves that is considered
the foundation work for microsonics.
In the simple model adopted by Rayleigh, the
particle displacements normal, W, and parallel, U,
to the free surface ( described above) are given in
steady-state form by
-
-
= Aq [ e- qz
-
---
W
1
2qs
] sm
. (kx - wt)
- - e- S Z
V = Ak [ e- qz
k2
+ S2
2k2
k2 +
e- ] cos (kx - wt)
SZ
S2
'
Rayleigh, Proc. London Math . Soc. 17, 1885, 4.
I. A. Viktorov, Rayleigh and Lamb Waves , Plenum, New York,
1967.
2
Volume 15, Number 3
where k is obtained from the characteristic
equation,
(k t / k)6
+ 8(k / k)4 + 8[3 t
2(k l / k t )2](k t / k)2
- 16[1 - (k l/ k t )2] = 0,
z and x are the normal and longitudinal coordinates
(the surface is taken to be infinite in extent along
the x and y axes with the propagation vector in the
positive x direction), and k t and kl are the transverse and longitudinal wave numbers, respectively,
q2 = k 2 - k l 2 and S2 = k 2 - k t 2 •
Solutions of the characteristic equation or Rayleigh equation give the wave velocity, V, in terms
of the measurable material parameters. It has six
roots, only one of which corresponds to a real
material, i.e.,
(k t/ k) = V/ V t = 0.87 :
1
~12<T ,
where (J' is an elastic constant characterizing the
propagation medium (Poisson's ratio) with the
limits of 0 and 0.5. As (J' varies between these
limits, the Rayleigh wave-phase velocity increases
monotonically from 0.87 V t to 0.96 V t where V t
is the velocity for a bulk transverse wave. Of particular importance is the nondispersive nature of
the waves; i.e., the velocity and phase are not
functions of the frequency.
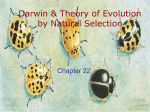
In Fig. 1a the normalized amplitudes of U and
Ware plotted as a function of normalized depths
from the surface. From this plot, details of particle motion as shown in Fig. 1b may be ascertained. At the surface, particles rotate on an elliptical trajectory with the direction of rotation being
retrograde to the propagation direction. At increasing depth, the magnitude of both displacements is diminished; the longitudinal component
(U) is 0 at 0.18 AR (A R = Rayleigh wavelength
= 271"/ k). At this point the wave is purely transverse; below this depth the longitudinal component magnitude increases, returning the particles
to an elliptical path. However, because of a sign
reversal in U, the direction of rotation is reversed.
Finally, at approximately two Rayleigh wavelengths into the medium, both components of
motion are essentially zero; thus the wave
(energy) is confined to a surface layer about
2AR in thickness.
This analysis provides a reasonable description
of surface waves for isotropic media that allow
elastic lattice-point deformation. Media having
3
1.2
face waves is the concomitant generation of bulk
waves. 3 Bulk waves, such as sonar, are a familiar
concept. A solid can support similar "internal"
elastic modes and oscillation of the entire medium
(plate modes). In SAW devices, if the interference
caused by the generation of bulk waves is ignored,
unexpected device behavior may result ; thus an
accurate model should incorporate bulk modes.
Bulk wave generation , interference, and elimination have been investigated, but the usual approach is to neglect their presence unless spurious
responses and interference make elimination
mandatory.
(a)
1.0
-80.8
.~
Q.
EO.6
I'll
"C
Q)
~! 0.4
E
0
zO.2
0
-0.2
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
Normalized depth, Z/)..R
Modeling
(b)
01000000
1~
Semim,jo, oxi,
S'mimino, oxi,
w-HJ
uV
Fig. 1-Rayleigh wave particle displacement.
(a) Amplitudes normal (W) and parallel (U) to the
free solid surface of propagation as a function
of depth into the solid.
(b) Trajectories as a function of depth into the
solid.
other than ideal properties are of practical interest. In general, such materials are nonhomogeneous, anisotropic, and elastic to a proportional
limit, and they display vibrational! electromagnetic
interactions. A reasonably accurate analytical
description is impossible in the most general case.
We must restrict ourselves to practical materials
that, to a high degree, are homogeneous and isotropic with or without a restricted class of interactions (i.e. , non piezoelectric or piezoelectric,
oriented single-crystal conductors, semiconductors,
or nonconductors). This encompasses most materials now being investigated.
A fundamental annoyance associated with sur-
4
A practical method for surface wave generation
or transduction relies on coupling to a crystalline
lattice via electromagnetic fields in piezoelectric
materials. In its elemental form , an IDT as shown
in Fig. 2 is used. The IDT is a comb-like structure composed of a thin-film metallic overlay delineated as interwoven fingers. An applied potential difference between combs stresses the surface
lattice. A time-varying potential difference will
cause time-varying stresses that travel from the
transducer in accordance with the spectral content
of the applied potential difference. Since this technique is used in the majority of SAW components
being developed and employed, we will limit our
discussion to the modeling of IDT's on piezoelectric materials. Table I lists the properties of
the primary piezoelectric materials being used in
the manufacture of the device.
In modeling for a particular application, two
complementary approaches are useful. The first
answers the question, "Given a desired signal
processing function , which structure (s) will approximate this behavior?" The second answers the
question , "Given the structure, what physical and
electrical charactf>:ri~tics can be expected?" The
latter question relates to device implementation
with input-output terminal properties specified.
Those having some familiarity with SAW technology, perhaps by exposure to review articles,4
may have the impression that each device has
physical and electrical uniqueness. However, upon
close examination one finds that most of them can
be described by a common model for electrical
parameterization and response. If we consider
3
J . deKlerk and R. M . Daniel, Appl. Ph ys. Lett. 16,1970, 219.
4
M . G. Holland and L. T. Clairborne, Proc. IEEE 62, 1974, 582.
APL Technical Digest
W = Overlap, typically 10-100 XR
a =XR/2
b =XR/4
XR = Rayleigh wavelength
(a) Perspective view
Piezoelectric
Interdigital
substrate
electrodes
(b) lOT details (top view)
+
-
+
-
+
-
+
Propagating
disturbances
(Rayleigh waves)
generated by
transducers
(c) lOT cross section
Fig. 2-Basic interdigital transducer (lOT) delay line.
only metallic overlays on piezoelectrics, they fall
under the analytical structure of transversal
filters. 5 In a transverse filter, a signal is passed
along a delaying medium with taps distributed
along its length. The output from each of the taps
is weighted in amplitude and/ or phase and then
is summed to give the output.
The frequency response of an apodized IDT
(an IDT with varied finger overlap) may be
related, at least to first order, to the Fourier transform (FT) of a continuous weighting function.
To determine the expected behavior of a transducer, one need only calculate the FT of the
apodization or weighting function. Conversely,
given the frequency response, a transducer can
be designed via the inverse FT.
Electrical Characterization
A first-order equivalent circuit, Fig. 3, represents one section of an interdigital structure.
Originally used by Mason 6 ,7 to describe bulk
oscillations, it offers a reasonable (experimentally
verified) model for surface wave devices. Voltages
and currents correspond to lattice point forces and
velocities, respectively. Second-order effects (nextnearest-neighbor electrode couplings, regeneration,
Table 1
MA TERIALS (PIEZOELECTRIC)
Material
LiNb03
LiTa03
Bi 12Ge0 2o(BGO)
Si0 2
Si0 2
ZnOjAb03
ZnO
AINjAl 20 a
PZT
BeO
CdS
Tourmaline
Crystal Cut
YZ
ZY
(111,011)
YX
ST-X
XZ
BASAL
XZ
BASAL
YZ
XZ
XZ
k 2 = piezoelectric coupling coefficient
k 2 (% )
4.3
0.74
1.7
0.23
0.16
0.28
1.0
0.63
"'='4.3
0.62
0.28
Vr (ml s)
T
3485
3329
1680
3159
3150
2740
2700
6170
2200
6580
1718
4400
Vr = Rayleigh wave velocity
(f..I.sl cm) TCD (ppm;oC)
2.87
3.12
5.95
3.15
3.17
3.79
3.70
1.48
4.55
1. 52
5.82
2.27
r=
delay per unit length
85
37
125
-22
<3
40
40
Loss (dBI f..I.s)
1.6
1.5
4.1
"'='5 (PZT 6 @ 40 MHz)
45
TCD
=
temperature coefficient of delay
w. P. Mason, Electromechanical Transducers and Wave Filters,
2nd ed., Van Nostrand, Princeton , NJ , 1948.
7 D. A. Berlincourt, D. R. Curran, and H. Jaffe, Physical Acoustics,
W. P . Mason (ed.), Academic Press, NY, 1964.
6
C . Atzeni and L. Masotti, IEEE Trans . Microwa ve Theory Tech.
MTT·21, 1973 , 505.
5
Volume 15, Number 3
5
27rf. h
. .
b
were
h On == - , rn IS t e transformer ratIO gIven y
V
rn = (_l) n
I!:. Cnk Z
~Ln
2
0,
L I/ is the electrical transmission line length, C n is
the capacitance of the one electrode section, k 2 is
Fig. 3-First-order equivalent circuit of one section
(nth) of an interdigital structure. Three-port model:
two acoustic (ports 1,2) and one electric (port 3).
bulk wave leakage, etc.) have been neglected.
These effects can be incorporated into a more
complex model requiring machine computation.
The equivalent circuit chosen is one dimensional , whereas surface fields are two dimensional. This ambiguity is resolved by further simplification of the physical problem into either a
crossed-field or in-line-field representation. The
.differences between the two representations have
been given elsewhere and , briefly, relate to the
dominant electric field component responsible for
Rayleigh wave transduction. The negative capacitance, -CII> will be short circuited for the crossedfield approximation. The choice of crossed-field
or in-line model is usually determined experimentally by examining the nature of the particular
piezoelectric used. For relatively weak electroacoustic coupling and a small number of transducer periods, differences between the two models
become negligible so that either one gives a
reasonable description of port properties. However, there are materials and orientation for which
neither model gives meaningful results.
The admittance matrix defines a relationship
between currents and voltages in the form
3
J /n)
=
~ Y j k(n) E k(n) .
k=l
For the nth section, the admittance matrix in the
crossed-field approximation is given by
Y ,k(n)
=
- j cot On
j esc On
- jr n tan On/ 2
j esc On
j cot On
- jrn tan On/ 2
-
[
- jrn tan On/ 2
]
,
- kr"Otan n / 2 j(wCn + 2rn2 tan On/ 2)
W . R . Smith et aI., IEEE Trans. Microwa ve Theory Tech. MTT-17,
1969, 856.
8
6
the effective piezoelectric coupling constant for
surface waves, and Zo is a characteristic impedance related to the material constants of the
medium. Equal conductive line and gap width is
assumed in deriving this transformer ratio.
The single-section admittance matrix above
represents a first-order approximation neglecting
several secondary effects. The matrix, despite its
drawbacks, is the basic starting point for a proper
electrical characterization of any given interdigital
structure operating on a piezoelectric medium.
The overall response is obtained by joining individual sections with their acoustic ports in series
and their electrical ports in parallel, and , with the
aid of a high-speed computer, calculating the
overall admittance matrix .
This procedure not only provides the electrical
port parameters of a transducer but also yields the
frequency response. The use of Fourier transformations , while providing the expected frequency response, does not electrically characterize
the device or consider source and load impedance
implicit in the admittance matrix approach.
3. Design Considerations
Transducer Patterns
Assuming a two-transducer filter, Fig. 2, one
must consider the overall frequency response as
the combined individual responses of the two
separate transducers. In the simplest arrangement,
one transducer is apodized and the other is a
broadband array consisting of a few finger pairs
(Fig. 4a). In this configuration, only one transducer
dictates the overall frequency response making
design implementation easy, but the filter suffers
from high insertion loss and undesirable rounding
caused by the sin (27Tf) / 27Tf frequency response of
the uniform transducer. These disadvantages may
be skirted by using a pair of apodized transducers in
conjunction with a multistrip coupler 5 (Fig. 4b).
The multistrip coupler allows each transducer to
operate essentially independently with the overall
response simply the product of the individual responses. Multistrip couplers are only practical on
APL Technical Digest
Interdigital surfacewave transducer
p.
It.
lezoe ec riC
substrate
iJln1 1 :~Jilllt~B
~
I
I I!!!!!i!i!!!illllllllli!i!i!i!!!!
Unweighted
Weighted (overlap)
(a)
(a) Two-transducer filter
Weighted (overlap)
Multistrip coupler
-3dB
o~
111!i!l!i!i!lllllllll!i!i!l!i!lll!
~
1!!!i!i!i!i!lIlllllll!i!i!i!i!i!!1
(b) Three-transducer filter
Weighted (overlap)
(b)
Weighted (phase)
Weighted (phase)
(e) Unidirectional transducer filter
(e)
Fig. 4-Possible two-transducer filter-weighting configurations.
high coupling substrates. Figure 4c illustrates a
phase-weighting method of achieving the desired
frequency response. Phase modulation (variable
finger spacing including finger removal or withdrawal) is used with uniform finger overlap, thus
allowing both transducers to be weighted without
the use of a multi strip coupler.
Two-transducer filters , shown in Figs. 2 and Sa,
suffer an inherent insertion loss of 6 dB (in addition to any other loss mechanism) due to the
bidirectional nature of the two transducers. The
input and output transducers are symmetric about
their centers; thus the input transducer radiates
only half the power toward the output transducer,
resulting in a 3-dB loss. Reciprocally, the output
transducer can reconvert only half the acoustic
energy incident on it from one side into electrical
output, resulting in another 3-dB loss. Half of
this loss can be removed by placing a second output transducer on the substrate on the opposite
side of the input transducer as shown in Fig. 5b.
Bidirectional loss can be completely eliminated by
using a multiphase unidirectional transducer (Fig.
5c). The multiphase drive removes the bidirectional symmetry and permits complete conversion
from electrical signals to acoustic signals traveling
in one direction.
Volume 15, Number 3
Fig. 5-Multiple transducer filters.
Materials
Currently the primary SAW materials being
used are quartz (SiOJ and lithium niobate
(LiNb0 3 ) . These are relatively inexpensive, easily
cut and polished , and consistent in their properties. Lithium niobate is used for its high coupling
coefficient, while quartz's primary attribute is its
temperature stability.
The curves in Fig. 6 give the minimum insertion loss as a function of fractional bandwidth
(::::./ I f) for several piezoelectric materials. As long
as the electrical Q, given by (7Tl 4k2) D./I/, where
k 2 is the piezoelectric coupling coefficient, is less
than the reciprocal of the fractional bandwidth,
one can easily match the device across the entire
bandwidth, and the minimum insertion loss is
limited to transducer bidirectionality. This condition is expressed as:
I:lf <
14k
2
•
f - \l7r
For lithium niobate, k 2 = 4.3 , which restricts
the fractional bandwidth to 25 % for matching
considerations. If the fractional bandwidth of the
transducer is greater than allowed by the above
criterion, the matching circuit must be loaded or
7
(YZ-cut) is almost self-collimating.
Matching
60
20
10
6 1---"W:"':~:-=-:'
°1~--~--~~~~
10~~~~~~~
Fractional bandwidth (percent)
Fig. 6--Minimum achievable insertion loss for bidirectional transducers on various substrates as a
function of fractional bandwidth.
mismatched so that its bandwidth will not limit
device performance. The amount of mismatch
required for larger fractional bandwidths increases
at a rate of approximatel y 12 dB per octave of
bandwidth . The insertion loss curves shown in
Fig. 6 are optimum values for the two-tran sducer
filter configuration (Fig. 5a) below center frequencies of 500 MHz (above 500 MHz other loss
mechanisms enter). For a three-transducer configuration (Fig. 5b ), the curves would be reduced
uniformly by 3 dB , and for unidirectional transducer configurations stiII another 3-dB (Fig. 5c)
improvement can be had.
In Fig. 6, LiNb0 3 appears to be an excellent
material for most devices; however, other effects
limit its usefulness. The temperature coefficient of
delay is 85 ppm/ oC compared to quartz with a
range of 0 to = 25 ppm/ oC. Because of its high
coupling coefficient, LiNb0 3 is more subject to
distortion effects such as reflections and regenerations. Other parameters that may affect substrate
choice include propagation velocity, beam steering, and beam spreading. Low-velocity substrates
minimize size for a given time delay, while highvelocity materials result in reduced resolution requirements during the fabrication process. In
devices with large time delays (long distances
between input and output transducers) , beam
steering and spreading effects become very important. Quartz generally tends to spread the acoustic
beam faster than predicted by diffraction theory,
but LiNbO a for a particular crystal orientation
8
In general, low-insertion-Ioss SAW devices require a matching network to assure optimum
power transfer between source and load impedances. The networks, usually made with lumped or
distributed elements, accomplish the required impedance transformation and in some cases provide
input and output filtering of unwanted spurious
signals.
The use of matching networks partially negates
the main advantages associated with SAW phenomena, namely, size reduction and temperature
stability. However, the ease of fabrication , reproducibility of results, and reliability associated
with SAW components (including their matching
networks) outweigh minor compromises for many
special applications.
4. Fabrication
The SAW medium must be carefully prepared
before the components are made. Each crystal
must be optically flat (at least on the propagation
surface) and have accurately aligned and defined
axes relative to the crystal boundaries. The substrates are then prepared for the transducer pattern delineation.
Metallized patterns are defined by using standard microelectronic processes. In the basic, most
widely used technique, metal is deposited over the
entire surface of the polished surface. The metallized surface is coated with photoresist (a lightsensitive polymer) by spraying or spinning. The
photoresist is exposed to UV light through a mask
containing the required interdigital pattern. The
exposed resist areas are removed during developing, while the remaining photoresist protects the
desired interdigital pattern against the metal etch.
After chemically etching, the protective photoresist is removed by stripping in a solvent. Using
this technique, devices up to 400 MHz (2.0- fLm
line widths) have been successfully fabricated.
Another technique, referred to as reverse lift
off, uses photoresist as a mask. The substrate is
first coated with photoresist. The pattern is defined
by illumination through a mask, and the holes for
the metal are developed in the photoresist coat.
The metal is deposited through the holes in the
photoresist. The excess metal (on top of the
photoresist) and the photoresist itself are removed
APL Technical D igest
by stripping. No metal etches are used, and lines
as fine as 1 fLm may routinely be defined using
this technique. To achieve the sharp line definition
required, the mask must make intimate contact
with the photoresist. Flexible masks and special
fixturing _are usually required to make this technique work.
Optical photomasks are limited to dimensions
of about 1fLm because the wavelength of radiation
necessary to cause the exposure of the photoresist
(typically 0.4 fLm) produces diffraction patterns
comparable to device dimensions. One-micrometer resolution would limit standard SAW operation to approximately 900 MHz. Electron beam
exposure can be used to overcome these difficulties
of diffraction and resolution. A modified form of
reverse lift off is used in which a special resist
coated on the substrate (e.g. , polymethyl methacrylate) is exposed by a computer-controlled flying
spot electron gun. In effect, the holes for the metal
are "drawn" into the resist. After exposure and
hole developing, the metal (aluminum) is deposited , and the excess along with the resist is
stripped away.
Dynamic focusing and computer-controlled
substrate stages have done much to reduce cost
and to process large areas by step and repeat
operations. Using electron beam masking, line
widths less than 100 nm are routinely achieved.
SA W reflective array structures require fine
grooves cut into the crystal surface. These are
formed by ion-beam bombardment or etching.
Ion-beam etching was developed as a tool for
surface finishing and fine polishing in which
material is very slowly removed (typically 1 nm/
min) by momentum transfer from a beam of
accelerated argon ions. The beam strikes the
surface at a relatively small angle with respect to
the surface, removing all microcracks and protuberances in its path. All materials may be polished by ion-beam etching, but the rate of etch
depends on the beam energy and the particular
material under ion bombardment.
To form the groove patterns for SAW reflective
arrays,9 it is necessary to mask the surface of the
device substrate. One method is to coat the surface
with a thin layer of evaporated aluminum , approximately SOO-nm thick. Openings in the
aluminum for the grooves are formed by standard
photolithography, and the substrate is then ex9
R. C. Williamson and H . I. Smith, Electron. Lett. 8, 1972, 401.
Volum e 15, Number 3
posed to the ion beam. The beam removes
material from the substrate surface through the
mask as well as part of the mask. Groove depth is
determined by time of exposure to the ion beam.
This process is highly controlled, since beam
energy is easily monitored and the exposure times
are long enough (several minutes) to allow accurate time measurements.
Nonuniform groove depth is obtained by exposing different portions of the device to the ion
beam for different times. Usually, the ion beam is
relatively collimated (typical beamwidth is 1 to
2 mm) , and the substrate is translated past the
beam on a controlled stage driven by a programmable stepping motor. Once the program is developed and the ion beam voltage and current
are well controlled, accurate reproducibility is
achieved.
5. General SAW Applications
SA W may offer a convenient way to realize components. However, designing to a specific response
function, although straightforward, is usually complex, requiring many iterations to finalize the
design. Once the design is established, its repeatability is ensured by the reliability of microelectronic fabrication processes and techniques. Current SAW devices being implemented in various
systems are delay lines, bandpass filters , pulse
compression (expansion) filters , coded filters ,
"matched filters," and oscillators. Convolvers,
programmable filters , amplifiers, phase shifters,
acousto-optical modulators, and chirp transform
processors are still under development.
Delay Lines
All SAW devices are basically delay lines. They
usually consist of two IDT arrays separated by a
distance, I, on a piezoelectric substrate (Fig. 7a).
The time delay, t d , for the device is given by
td
= ll V,
where V is the Rayleigh velocity of the acoustic
wave for the given substrate material (Table 1).
It is apparent that the maximum time delay for the
V of a given material will be determined by the
spacing between IDT's and hence substrate size.
Substrate size is dictated by the constraints of the
circuit package size and the availability of large
piezoelectric crystals. LiNbO:i crystals 15 cm long
have been prepared and, assuming that 10 cm of
the length could be used for delay (the rest for
9
Basic interdigital
Reflective arrays
Wraparound
Output
transducer
(a) Short delays
(c) Super-long delays
(b) Medium-long delays
Fig. 7-SAW delay line structures.
crystal polishing, IDT's, and absorbing materials) ,
the resulting delay would be 28.7 fl-S.
To achieve greater delay without increasing
physical size and cost (large single crystals are
expensive) , other techniques have been developed.
The most successful is the reflective array9 (Fig.
7b), which operates as follows. An acoustic wave
is generated by a wideband IDT and propagates
toward one of the reflective arrays of grooves that
have been ion-beam etched in the substrate surface. Each groove reflects acoustical energy at
right angles to the incident beam; the frequency
and amplitude of the reflected wave depend on the
periodic groove spacing and the number and depth
of the grooves, respectively. A second array
parallel to the first reflects the acoustic wave
toward an output IDT.
On LiNb0 3 , reflective array delays in the 50to 60-fl-s region are readily achieved using available crystal lengths. On quartz, which is another
popular piezoelectric that is available in long
single crystals and has greater delay coefficient
per centimeter, delays of 100 ftS have been obtained ..~
For even larger delays, experimental wraparound delay lines (Fig. 7c) have been constructed. 1o The closed-loop path (Fig. 7c top) uses
one transducer for both input and output, and the
surface wave makes multiple passes. Long delays
suffer from aliasing and loading problems produced by reflected signals generated by the IDT
during each pass of the surface wave. With angled
input and output transducers (Fig. 7c bottom),
10
G. S. Kino and H . Matthews, IEEE Spectrum 8, 1971, 22 .
10
aliasing and loading effects are minimized, and the
helical path followed by the surface wave produces long time delays with little distortion. Using
this structure, delays in the 1- to 10-ms range
have been observed with minimum loss in the
signal energy, provided that the corners and end
faces are optically polished and lapped.
IDT Dispersive Delay. Surface waves exhibit
no natural velocity dispersion; however, dispersion may be "created" by allowing the distance of
propagation to vary with frequencyY Dispersive
delay lines are fabricated the same way as are
uniform delay devices except that the spacing
between electrodes of each IDT is not held constant. Instead, a "graded periodicity" (Fig. 8)
makes each electrode pair resonant at a different
fixed frequency and, since the physical position of
each electrode is different, the time delay (i.e.,
distance between synchronous electrode pairs
divided by the acoustic velocity) will vary with
frequency. The input IDT is then dispersive and,
if the output transducer is delineated so that the
highest frequencies travel the shortest distance
(Fig. 8a), the dispersion can be doubled. When
an impulse (short compared to a half period at the
highest frequency) is applied to the input (left
side) of the device shown in Fig. 8a, an expanded
frequency-modulated pulse is detected (after a
time delay equal to the distance traveled by the
highest frequency divided by the acoustic velocity)
at the output (right side of Fig. 8a). This expanded pulse is called a "downchirp" because the
delay versus frequency slope is negative. The
11
J. deKlerk, Phys . Today 25,1972, 32.
APL Technical Digest
Transducer
~__________P_
u_
I~~ex~r-nS_io_n__________~
HH
L
L
~tterns
Pu lse compression
~------------~
H
L L
(a)
~
1
At
H
(e)
~t
/41
~------------~
1111111111111111111111
(b)
~I
~
A=
Tfmedomain
functions
respon~
(d)
Fig. 8-SAW interdigital dispersive delay lines.
length of the expanded pulse (Fig. 8b) is
6.t = (dL
-
dH)/ V,
where d L is the propagation distance for the lowest
frequency (/L) and dH is the propagation distance
for the highest frequency (/H). 6.t is called the dispersion. The bandwidth, 6.f, of the expanded pulse
is
6./ =
whose spacing is determined by the center frequency of the device) and two sets of obliquely
placed etched gratings (the grating angle depends
on the ratio of SAW velocity in the initial propagation direction to the velocity in the reflected
direction (Fig. 9) ) . 9 The spacing between slots in
(/H - /L).
If the expanded pulse is fed into the input
transducer of Fig. 8c, a compressed pulse having
a sin (271"f) / 271"/ response is received at the output
transducer (Fig. 8c). This pulse compression is
referred to as an "upchirp" since the delay versus
frequency slope is positive. The amount of compression is determined by the pulse compression
ratio (PCR), which is the product of the bandwidth and pulse length (time-bandwidth product),
PCR = tl/
tlt.
The amplitude A of the compressed pulse (Fig.
8d) is
A
= v'PCR = v'tl/ tlt,
and the 3-dB bandwidth of the compressed pulse
is 1/ tl/.
Reflective Array Dispersive Delay. The reflective array compressor (RAC) consists of an
input and output IDT (broadband, few fingers,
Volume 15, Number 3
(a) Reflective array
ex~nder
pu l~
(b) Reflective array
compressor
pul~
Fig. 9- SAW reflective array dispersive delay lines.
11
the gratings is varied, the closest being adjacent
to the input and output grids. The structure will
selectively reflect frequencies according to the
spacings between slots. Thus, high frequencies will
be reflected nearest the transducers and low frequencies farthest away, yielding short propagation
paths for high frequencies and long paths for low
with the response amplitude synthesized by
groove-depth weighting.
Reflective array devices have extremely high
tolerance to fabrication defects. Defects cause only
minor problems, since the groove acts only as a
mechanical discontinuity and the reflection coefficient of the entire groove is not seriously
affected by a small defect. The IDT's on reflective
arrays are simple and easily fabricated, the grooveto-groove spacing in the propagation direction
being one acoustical wavelength compared to onehalf wavelength for a standard IDT and onequarter of an acoustical wavelength if split fingers
are used. 5 Since the grooves are located at about
45 0 to the propagation directions, the required
photographic resolution is 0.707 of that required
for the standard IDT.
Reflective arrays have two disadvantages: a
larger insertion loss (because acoustical reflection
at each groove must be kept small to avoid dispersion) and one extra fabrication step, i.e., ionbeam etching.
Table 2 presents the latest state-of-the-art
figures for IDT and reflective array dispersive
delay lines.
Bandpass Filters. SA W bandpass filters are
used in military communications and radar systems
for both IF and RF applications. 5 To date the
only large-volume commercial application has
been filters for television tuners. 9 Table 3 presents a representative list of specifications available from SAW bandpass filter technology today
along with a projection for the next 2 to 5 years.
Figure 10 illustrates a representative filter and its
transducer pattern in addition to its transducer
apodization pattern.
Despite problems associated with matching,
bulk wave generation, and insertion loss, SAW
bandpass filters offer some attractive advantages
over most conventional filter technologies ( 10
MHz to 1 GHz), including small size, low weight,
low-cost construction, simplicity, high reproducibility, and design flexibility.
A filter's size essentially depends on its bandwidth; for a bandwidth greater than a few megahertz it occupies an area of less than 100 mm 2 and
a thickness of a few hundred [Lm. Even when
mounted, the weight of such a device is only
several grams. Given a polished and oriented
crystal, the electrode pattern is the only structure
that must be accurately defined. The pattern is
Table 2
TYPICAL PERFORMANCE CHARACTERISTICS OF SAW DISPERSIVE DELAY STRUCTURES.
CW INSERTION LOSSES FOR BOTH REFLECTIVE ARRAYS AND INTERDIGITAL STRUCTURES
ARE HIGH, RANGING FROM
Center Frequency
(MHz)
Interdigital Structures
30
30
60
100
150
300
1250
1300
Bandwidth, D.f
(MHz)
5
5.6
20
35
50
100
500
500
25
TO
50
dB
Dispersion, !:1t
(J.Ls)
2
50
50
5
2.5
10
0.5
0.5
Time-Bandwidth
Product
(!::.j !::.t)
10
280
1000
175
125
1000
250
250
Reflective Array Structures
60
60
60
200
500
1000
1000
12
6
2.5
6
50
250
512
200
20
125
100
30
40
10
50
120
312
600
1500
10000
5120
10000
APL Technical Digest
Table 3
SAW BANDPASS FILTER PERFORMANCE PARAMETERS, CURRENT AND NEAR-TERM
PROJECTIONS
Current
State of the Art
Projected
10 MHz --=1.0 GHz
50 kHz-O.4 fo
6 dB
1.2
50 kHz
45 dB
60 dB
±1.5°
0.5 dB
-40 dB
5 MHz - 1.5 GHz
50 kHz-O.4/0
0.7 dB
1.2
50 kHz
65 dB
80 dB
±1.5°
0.5 dB
-50 dB
1 MHz-2 GHz
20 kHz-O. 8 /0
0.5 dB
1.2
20 kHz
70 dB
80 dB
±1.0°
0.05 dB
-50 dB
controlled by highly reproducible photolithographic procedures after the initial photomask
has been produced. Any desired number of identical units can be produced, and the filters require
no tuning after manufacture.
Within limits, wide flexibility in design is possible. The phase and amplitude of filters may be
controlled separately; i.e. , a wide range of amplitude responses can have linear phase. The independence of amplitude and phase is a result of the
signal delay between the electrodes in the transducers. Filters that incorporate delays in this
manner are called transversal filters. 5 SAW pro-
(a) Transducer pattern
298.5
300
301 .5
Frequency (MHz)
(b) Frequency response
Fig. 10-Response of a SAW bandpass filter.
Volume 15, Numb er 3
YEARS)
Current
Typical
Parameter
Center Frequency, /0
Bandwidth
Minimum Insertion Loss
Minimum Shape Factor
Minimum Transition Bandwidth
Sidelobe Rejection
Ultimate Rejection
Deviation from Linear Phase
Amplitude Ripple
Triple-Transit Suppression
(2 - 5
vides a very convenient way to implement small
high-frequency transversal filters.
Resonant Structures
Narrowband filters (ll// /< 1 %) can be implemented by using an IDT with many fingers, since
the acoustic bandwidth is inversely proportional
to the number of fingers. 12 Narrow bandwidths
with quality factors of 10 4 and 10 5 would require
long transducers resulting in poor yields. Other
approaches for obtaining narrowband filters have
been considered, such as long transducers with
finger withdrawal, wraparound delay, and resonant "cavities."
Long Transducers with Finger Removal. This
approach uses long transducers such as those that
would have a large number of fingers for a given
narrowband response (e.g., Fig. 10) except that
large groups of fingers are omitted from each
transducer. An example of the finger-withdrawal
technique is shown in Fig. lla. A two-transducer
filter design with 2404 fingers per IDT has all
except 32 fingers per ID comb removed. The
bandwidth of the original filter (with no fingers
removed) at a center frequency of 100 MHz is
approximately 0.08% (given essentially by l / Tt ,
where T t is the total time for a SAW to travel the
IDT). As fingers are removed, more peaks appear
in the frequency response (Fig. 11 b ). The frequency interval between the peaks is l / Tp , where
T Jl is the SAW propagation time from elemental
comb to elemental comb. By the proper selection
of elemental group spacings, it is possible to
obtain a frequency response with one or at most a
few peaks.
l~
R. H . Trancrell and M . G. Holland, Proc. IEEE 59, 1971, 393 .
13
HSOA=VIT
be used to isolate response peaks and provide a
narrowband filter. 10
HSOA
p
Resonant Cavity. SAW crystal resonators or
resonant cavities are a relatively new class of
SAW devices. The basic resonator structure is
shown in Fig. 12a. It consists of two SAW grating
reflectors with an IDT placed inside the cavity to
provide electrical input! output coupling. The
operating characteristics of the cavity will depend
on the reflection coefficient of each reflector,
which can be as high as 98 %, as well as on the
separation between reflectors. The reflectors may
consist of a periodic array of overlaid stripes,
either metallic (field-shorting type) or dielectric
(mass-loading type) , or an array of etched
grooves as in the reflective array structures.
W[]JDJ[]J
---1
---1
~
~ 321202A
fingers
1202A
32
fingers
16 sections
16 sections
(.) Transducer pattern
O' ~TT~~~~~-r~~~~~~~
-4
CD -8
~-12
-3 16
.e-
~-20
4(-24
-28
When an RF voltage of the proper frequency
is applied to the IDT, SAW's are generated and
propagate away from the transducer in both
directions. The overlap of the IDT is large compared to the acoustic wavelength to minimize diffraction , and the acoustic waves have constant
phase across the entire transducer aperture. As
the waves enter the grating reflector, coherent
multiple reflections occur and a large standing
wave is set up in the cavity. The standing wave
produces a profound effect upon IDT impedance
characteristics, resulting in a high quality factor
( = 10 4 ) at resonance. SAW cavities with resonant
frequencies as high as 1 GHz have been made.
99
(b) Frequency response
Fig. II-SAW comb filter generation by finger removal.
Wraparound Delay. Wraparound d~lay lines
(Fig. 7c) may be used as a narrowband comb
filter. Here the frequency envelope is determined
by the elementary comb response, while the frequency separation is given by 1/ T d , where T d is the
SAW propagation time around the path. Peak
shape (width) is a function of loss and is given
approximately by 1/ T e' where T e is the time after
which the amplitude has decreased to 1/ e of its
original value. Combinations of transducers can
Another type of SAW resonant cavity consists of
two IDT's with a single grating reflector placed be-
Output
10 transducer
O.-~.........---.--..........,-...--~
-2.5
~ -5.0
III
~ -7.5
.§-10.0
.~ -12.5
c: -15.0
~-17.5
(.)
(b)
-20.0
0.990
1.005
-22.5
0.995 1.000
1.010
0.985
fifo
(e)
Fig. 12-SAW resonant cavity structures and a typical response function.
(a) Single transducer inside two reflective gratings.
(b) Two reflective gratings inside lOT's of basic delay line forming resonant cavity.
(c) Frequency response of resonant cavity (b).
(Q is typically 6.15 x 103 , to equals 68.5 MHz)
14
APL Technical Digest
tween them. The two IDT's form a surface wave
delay line with a transfer function proportional to
[sin (27rf) / 27rf]2 and a large fractional bandwidth
if each IDT is composed of a few finger pairs.
The SAW reflector is composed of a large number
of reflector sections that consist of a quarter wavelength section of impedance Z l (the strip) and a
quarter wavelength section of impedance Zo (the
gap). Because of the impedance discontinuity,
each reflective element contributes a small reflection of the SAW as it propagates through the
section. The bandwidth over which the surface
waves are reflected is much smaller than the
transducer bandwidth if the number of reflecting
sections is large compared to the number of IDT
finger pairs. The reflector thus creates a narrow
stopband notch in the passband response of the
delay line.
The two-transducer configuration may be used
as a cavity resonator by placing two of these
gratings between the transducers to reflect the
surface wave upon itself many times. The structure
is shown in Fig. 12b; a typical response curve is
given in Fig. 12c.
Multistrip Coupler. The multistrip coupler employs the second-order effects to couple energy
from one area of a SAW medium to another. !)
This coupling is the result of the alternating potential difference between metal strips and the
acoustoelectric wave beneath the fingers of each
ID comb (Fig. 4b). The metal fingers conduct
these potentials along their length to generate
new acoustic waves. Multistrip couplers have been
used for track changes, reflectors, unidirectional
transducers, and reflecting track changers.
Oscillators/Waveform Generators
Oscillators. Lewis has shown that a transistor
oscillator with a SAW filter in the feedback loop
(Fig. 13a) will exhibit great stability.13 The SAW
filter characteristic controls the frequency of oscillation. If it is built on a crystal that has temperature compensation, the frequency stability will be
comparable to that of conventional quartz crystal
oscillators. Both aluminum nitride piezoelectric
films and silicon layers can be deposited on sapphire, thus giving rise to the hope that this oscillator can be fabricated as an integrated component.14
13
M . F . Lewis, Ultrasonics 12,1974, 115.
P. J . Hagon, F . B. Micheletti, R . N. Seymour, and C. Y. Wrigley,
Trans. Microwa ve Th eory Tech. MTT·21, 1973, 303.
14
Volume 15, Number 3
SAW filter: frequency =fo
bandpass = ~f
delay
= 'T
(8) CW oscillator
Spatial pattern as
etched on silicon
Output
~
(b) Pattern generator
Fig. 13-SAW oscillators are formed by placing SAW
filters in the feedback loops of transistor amplifiers.
Nonlinear elements and overlays give rise to pulsed
signals and pattern generation.
Waveform Generators. Many new SAW devices
exist for transforming various signals and patterns
into such forms as convolvers, Fourier transformers, optical scanners, and acousto-optic devices.
Each must be driven by a special waveform.
Typically, the convolver requires a short pulse for
the time reversal of the signal. In pattern recognition, a wide variety of waveforms is required.
Fourier transforms and various acoustic optic devices require a linear chirp as the driving source.
Long pulses (duration greater than the SAW
filter delay) may be generated by using the Lewis
oscillator (mentioned above) simply by turT1ing
the amplifier off and on (i.e. , by applying a rectangular waveform to the power supply). For
short pulses, this technique does not work so a
new, regenerative pulse amplifier (RPA), method
is used. In the RP A method, a nonlinear element
is included in the SAW oscillator feedback loop.
A silicon epitaxial layer adjacent to the SAW filter
could be used. This layer attenuates (absorbs) the
acoustic energy, but it does saturate; under these
conditions high-level waves suffer less attenuation than low-level waves. In this case, the oscil-
15
lator will act as an RGA and generate a series of
pulses whose bandwidth is determined by the
system bandwidth (the SAW filter bandwidth if
the transistor amplifier bandwidth is large) .15 The
repetition rate is determined by the total looptransit time.
A chirp generator could be constructed by
using a dispersive filter driven by the short pulses
from the RGA. Pattern generation can be achieved
by using the electric field coupling between a
silicon layer and a piezoelectric substrate. It is
only necessary to etch a spatial pattern onto a
silicon eptaxial layer. The etching changes the
spacing and hence the coupling between the silicon and the piezoelectric. When this component
is driven with both an RF signal pulse and a short
scanning pulse as shown in Fig. 13b, the spatial
etched pattern is transferred onto the signal pulse.
Matched Filters
In signal processing of radar and communications systems, it is often necessary to extract a
signal pulse in the presence of noise, e.g. , to detect
a peak power-limited radar signal. Correlating the
active multiplication of a signal and a reference
waveform followed by summation or integration
techniques can perform the required detection in
the presence of noise when the shape of the input
signal is known. The process involves the convolution of the input signal, V i n (t?, with a weighted
detection function, h( t) , such that the output
signal is given by
1~
c. Cuiter, Proc.
IRE 43,1955, 140.
Vou.{t)
~ f~ h(t)V,,(t -
The optimum weighted detector function to use
for improving the output signal-to-noise ratio in
the presence of band-limited white Gaussian noise
is the time inverse of the input signal. Thus, the
detector is "matched" to the input signal and is
called a matched filter. The term usually has been
applied to a tapped delay line or nonrecursive
filter structure (passive device). SAW devices can
be used to implement efficiently either a matched
filter or correia tor .
SA W versatility allows a large number of waveforms to be generated and match-filtered, including linear chirps and a host of non-FM waveforms such as Barker codes, biphase codes, higher
polyphase codes, burst processing sequences, and
pseudorandom codes.
Figure 14a illustrates a generated and correlated
fixed code signal. Any number of codes, from a
few-bit Barker code to a thousand-bit pseudorandom sequence, can be implemented in this manner. For a reasonable number of bits ( :S; 100) at a
frequency of 100 MHz, the design and fabrication
are relatively straightforward. As the number of
bits increases, the number of ID fingers increases,
and problems of second-order effects come into
play. Ways to compensate for these problems
include the use of split electrodes, dummy fingers,
dielectric film overlays, and tilted transducer
geometry. 5
A simple, nonperiodic, coded burst of RF
energy (Fig. 14b) can be used as an effective
- 1 I -------il ffiI ~L.f\Mr-·1m
.rO III
100n5
-
.,
-
-
r) dr,
I ~
I
...
...
(a) Fixed (biphase-coded sequence generator/receiver)
I~---nn-ii·+
I
Biphase correlator
Matched filter
(b) Fixed (matched filter)
Fig. 14-SAW coded devices.
(a) Fixed (biphase coded sequence generator/ receiver).
(b) Fixed (matched filter).
16
APL Technical Digest
radar signal. If the burst is processed through the
matched filter shown (a tapped delay line) , and
if the original burst were carefully designed, the
output is one main pulse with very low sidelobes.
If the code has n pulses arranged so that no more
than two pulses overlap upon correlation (except
when they all overlap) the peak-to-sidelobe ratio
is n/ l. The sidelobes stretch out on either side of
the correlation peak for a time equal to the pulse
length.
Programmable "matched" SA W filters are
needed, especially for identification, synchronization, and spread spectrum communications. Although these SAW devices are not as refined as
the fixed-code matched filters , their feasibility has
been demonstrated and they will be available for
future systems application.
Convolvers
The SA W devices discussed so far operate
below the saturation level of the acoustic medium.
The medium becomes nonlinear at a point where
Hooke's law is not obeyed (i.e., stress is not proportional to strain). These effects become noticeable when relative strain reaches levels on the
order of 10-4 • 10 This nonlinear behavior leads to
parametric interactions between different RF
signals.
Figure 15a represents a degenerate SAW convolver. When applied to the IDT's, the two input
waveforms launch surface waves toward the center
of the device. The substrate is required to give a
nonlinear relationship between the electric field
and the acoustic strain, such that fields proportional to the product of the two SAW strains are
produced. The fields are detected by the parametric electrode. The term "degenerate" refers to
the fact that the interaction is strongest when the
two input waveforms have the same center frequency.
Although the interaction mechanism is not fully
understood,16 the important features may be explained by the fact that in suitable materials the
nonlinear piezoelectric relation can be expressed as
D = EE - eS
+ KS2,
where D is the electric displacement, E is the
dielectric constant, E is the electric field, e is
a piezoelectric constaI!t, and S is the acoustic
strain. Constant K , which determines the nonlinear
interaction, is assumed small so that SAW strain
can be regarded as undisturbed by the interaction.
Assume two counter traveling waves at the
same frequency with strains
Sl = al cos (wt - kx)
and
S2 = a2 cos (wt
+ kx).
The total strain, S = S1 + S2' will produce a term
in the above electric displacement equation proportional to a 1 a 2 cos 2wt. This term has frequency
2w and no spatial dependence and is detected by
the parametric electrode (a uniform metal film
acting in conjunction with a ground plane on the
16
F . G . Lean and C. C. Tseny, J . Appl. Phys . 41,1970, 8912.
(b) Non-degenerate
Fig. IS-SAW convolvers/correlators.
V olume 15, Number 3
17
reverse side of the substrate).
The detection by a plate of length, L, implies
that the signal at 2w is integrated over L. It can be
readily sho~n that the detected signal is the
convolution of the two input signals.
N on degenerate convolvers (Fig. I5b) are designed
to operate with different center frequencies, WI
and W 2, at the two input ports. It can be shown
that the product term at frequency W 3 has the form
ala 2 cos [W 3t + (k 2 k 1)x], where W 3 = WI + W 2 and
kl and k 2 are the wave numbers of the input SAW's.
The associated electric fields can be detected by an
IDT whose periodicity corresponds to the spatial
variation of the product term, i.e., an IDT synchronous at W 2 - WI. Note that this does not correspond to the output frequency and that the
expression for the product term does not imply
excitation of a SAW at frequency W 3.
Amplifiers
SAW amplifiers come in two basic types: combined media amplifiers (CMA) 17 and separated
media amplifiers (SMA) . 1 8 A typical CMA is
shown in Fig. 16a. Cadmium sulfide (CdS) ,
which is piezoelectric and photoconductive, is
used for the substrate. Under illumination, carriers
that are produced near the surface interact with
the electric field of a Rayleigh wave propagating
along the surface. If a voltage is applied across the
illuminated region, the carriers can be caused to
drift in the direction of the propagating surface
wave. If the carrier velocity is greater than the
SA W velocity, energy will be delivered to the
wave, and its amplitude will . increase with distance. If the carrier velocity is less than the SAW
or in the opposite direction, the wave will be
attenuated.
In SMA, the functions of semiconductor and
acoustic media are separated. A typical configuration, shown in Fig. 16b, uses a thin film ( <= 1 /Lm)
of silicon deposited on sapphire as the semiconductor; this is separated from the acoustic substrate (LiNb0 3 ) by silicon dioxide (Si0 2 ) spacer
rails or randomly placed dots like the pilings on a
fishing pier. Typical spacings are of the order of
50 nm. There is a gain, just as in the CMA's,
when the drift voltage makes the carrier velocity
greater than the SAW velocity. Loss occurs when
17
R . M . White and F . W . Voltmer, Appl. Phys. Lett. 8, 1966, 40.
J. H. Collins, K. M . Kakin, C . F . Quate, and H . J . Shaw, Appl.
Phys. Lett. 13, 1968, 314.
18
18
(8) Combined media (CMA)
Expitaxial
semiconductor
film
(b) Separated media (SMA)
Fig. I6--SAW amplifier structures.
the velocity is less than that of the SAW or the
potential is oppositely directed.
Frequency gain depends on the gap spacing.
The spacing for maximum gain is given by
27rh/ AR = fO / fp,
where h is the gap spacing, AR is the Rayleigh wavelength, and fp is the effective dielectric constant of
acoustic material. On LiNb0 3 at 200 MHz (fP =
50 fO), his 50 nm for maximum gain.
These amplifiers exhibit loss in the backward
direction and thus give good triple transient suppression. Noise figures as low as 5 dB have been
measured with saturation levels as high as 1 W.
The noise figure decreases as the gap spacing
increases, whereas the power handling capability
increases. However, the gain decreases. Projected
efficiencies may eventually reach 10% with low
APL Technical Digest
- - - -- - - -- - - -- - - -- - - -- -- - - - - - - -- - - - - - - - - - - - - -- -- -- - - - - - - -
noise and operating frequencies from 50 to 1000
MHz.
Optical
grating couplers
(prism couplers
could be
Phase Shifters
The use of an external electric or magnetic
field applied to the propagation path of a SAW
(e.g., between the two transducers of a SAW
delay line) will produce a change in SAW velocity,
thus giving rise to a phase shift. The external
field is usually applied through an interaction
medium (thin-film overlay). Electric field phase
shifting is accomplished by using an electrostrictive overlay or by direct coupling in piezoelectric materials.
A basic magnetic SAW phase shifter19 consists
of a magnetostrictive thin film (e.g., 0.85-fLm nickel,
vacuum-evaporated) deposited on a SAW delay
line between the two IDT's. The acoustic wave is
launched in a Rayleigh mode but is converted to
a layer mode as it passes under the film. Since the
film is magnetostrictive, its effective elastic moduli
depend on the direct magnetic bias field applied.
Any change in the elastic moduli in the film
changes the velocity of the acoustic wave propagating in the layered media and hence produces a
phase shift. In typical experiments , phase shifts as
high as 80° at 210 MHz have been reported.
Acousto-Optics
The propagation of an acoustic wave in the bulk
or on the surface of a transparent material produces a periodic modulation of the index of refraction by means of the elasto-optic or photoelastic
effect. The resulting "optical phase grating" may
diffract portions of an incident light beam in one
or more directions. The grating spacing is equal to
the acoustic wavelength and may be varied by
changing the frequency of the acoustic signal.
The acoustically established and controlled phase
grating may be used for the deflection's modulation and filtering of an incident light beam, thus
allowing the implementation of devices such as
optical switches, modulators, correlators, scanner~,
turnable filters, and spectrometers. Planar acoustic
optic devices using SAW offer increased perfo:mance, reduced size, reduced power consumptIOn,
and better control and phase matching than their
bulk wave counterparts. 20
substrate
(8) Colinear
(b) Non-colinear
Fig. 17 -Acousto-optic deflectors.
Acousto-Optic Deflectors. There are two types
of acousto-optic deflectors: (a) the incident and
deflected light beams are both guided by optical
waveguides as shown in Fig. 17a, and (b) the
SA W deflects the incident guided light beam out
of the waveguide into an unguided radiation mode
(Fig. 17b). In the first type, Bragg efficiencies up
to 93% have been reported,21 while in the second
type the angle at which the beam escapes may be
changed by varying the SAW frequency. 2 2
Acousto-Optic Mode Converters. An acoustooptic mode converter is essentially a~ aco~sto
optic deflector in which a thin-film optIcal gUIded
wave is diffracted from one mode to another by a
SAW. 23 Figure 18 illustrates a typical experimental device. The waveguide is 1.6-fLm-thick
electron-beam-evaporated 7059 glass film on an
aluminum-coated LiNb0 3 substrate. The laser
beam (A = 632.8 nm) was coupled into and out
of the waveguid~ with grating couplers. The SAW
is launched by an IDT parallel to the guided light
beam. At 320 MHz (SAW) with proper phase adjustment, there was a 55 % coupling from the
TE3 to the TEl waveguide mode.
•
Acousto-Optic Modulators. ModulatIOn occurs
due to diffraction of the guided optical wave by
K. w. Loh, w. S. C. Chang, and R. A . Becker, IEEE I. Quantum
Electron. QE-11, 1975, 86D.
21
A. K. Ganguly, K. L. Davis, D . C. Webb, C. Vittoria, and D. W.
Forester, Electron. Lett. 11,1975,610.
19
22
R. V . Schmidt, IEEE Trans. Sonics and Ultrasonics SU-23, 1976,
22.
20
Volume 15, Number 3
F . R. Gfeller and C. W. Pih , Electron . Lett. 8, 1972, 549.
L. Kuhn, P. F . Heidrich, and E. G. Lean, Appl. Ph ys. Lett. 19,
1971 , 428 .
23
19
Input
beam
LiNb03
substrate
Optical grating
couplers
Fig. 18-Acousto-optic mode converter.
the acoustically established phase grating. Specific
details depend upon grating width (W) and the
grating spacing (d). For large width-to-spacing
ratios (W / d), the situation is similar to that of
X-ray (Bragg) diffraction by a crystal lattice.
Conservation of momentum leads to the Bragg
condition for beam deflection single ({)B)' This
type of modulator, which is also a switch, has the
advantage of giving amplitude modulation without the need for an additional polarizer as is
usually required. The intensities of the undiffracted and diffracted beams are 10 (cos 2 cp/ 2) and
10 (sin2cp / 2), respectively, where cp is the acoustooptically induced phase shift.
Acousto-Optic Correlators. A SAW properly
coupled with guided optical waves may be used to
produce convolution (correlation) in thin-film
optical waveguides and potentially in single-mode
optical fibers. In a typical optical guided waveSA W convolver, 21 the optical guided waves from
two SA W transducers are appropriately combined to give an electrical output signal from an
optical heterodyne receiver, which is the convolution of the input signals.
Chirp Transformation
Chirp transformation (CT) is a signalprocessing technique for obtaining the Fourier
transform (FT) of a signal by mapping the frequency domain into the time domain. 24 In its most
common form, the CT consists of premultiplication of the signal by a waveform whose frequency
varies linearly with time (chirp), followed by a
convolution in a chirp filter with opposite fre-
quency-modulation slope. The FT is obtained by a
final multiplication with a chirp identical to the
premultiplication stage. This method is termed
MCM (multiplication-convolution-multiplication)
processing. A discrete form of CT, known as chirp
z-transform (CZT), was developed by Rabiner et
al. 25 for the computation of the discrete FT (DFT)
of sampled data. CZT techniques are now routine
in digital processing.
Although CT methods have been known for
several years, it was not until the advent of SAW
product chirp filters with high time-bandwidth
products that real-time CT processing of analog
signals could be considered. Charge-coupled
devices (CCD's) 26 have also provided powerful
means of implementing chirp filters. However,
CCD filters operate from baseband up to approximately 10 MHz (experimentally ~ 100 MHz),
while SAW chirp filters cover the range from 10
MHz to 1 GHz. Thus CCD and SAW appear to
be complementary technologies for analog CT
processing.
Several real-time signal-processing techniques
based on analog CT processing are possible including spectral analysis, network analysis (determination of network transfer function), and signal
filtering (linear filtering-direct synthesis of transfer function), with the possibility of externally
programming the filter function , signal generation,
and synthesis.
6. SAW at APL
The Advanced Technology Section of the
Microelectronics Group acts as a center for inhouse SAW awareness and in this capacity has
made many contributions to Laboratory projects.
Several prototype devices, primarily filters and
delay lines, have been made and tested. In addition, an in situ thin-film vacuum deposition rate
and thickness monitor was developed that directly
incorporates SAW phenomena.
The Group entered SAW technology approximately five years ago, at a time when microelectronic techniques were used to fabricate transducers for research studies. These investigations
used time and space resolution in mapping the
radiation of bulk waves concomitantly generated
with the SAW. SAW frequencies up to 250 MHz
2;
A. P apoulis, System s and Transforms with Applications in Optics,
McGraw-Hili, NY, 1968.
24
20
L. R . Rabiner et aI., Bell Syst . Tech . J. 48, 1969, 1249.
H. J. Whitehouse, IEEE Trans. Solid State Circuits SC-ll, 1976,
64.
26
APL Technical Digest
240
10
180
120
fo = 25.575 MHz
BW (3dB) = 0 .8 MHz
Sidelobes:
29.4 dB at 27.353 MHz
32.5 dB at 23.668 MHz
29.0
Fig. 19-Performance characteristics of slit-slit transducer filter (insertion loss and phase shift versus
frequency).
were required, and photolithographic fabrication
methods with resolutions' approaching 1{Lm had to
be developed. Using these acquired fabrication
techniques, the Section designed several delay
lines and bandpass filters. While the first devices
were of a basic nature, they aided our understanding of SAW devices and gave insight into their
potential applicability. The performance characteristics of one of these filters is shown in
Fig. ] 9. It is a 25-MHz two-transducer filter on
a lithium niobate substrate. Each transducer consists of 35 finger pairs with a slit-type geometry
(more metal than gap). Slit-type transducers reduce spurious responses due to reflected signals
and regeneration. The salient filter parameters are
9-dB insertion loss (no external matching networks), 0.8-MHz bandwidth, 25.575-MHz center
frequency, 1.5-dB ripple, 20-dB sidelobe rejection, and better than 1 0 phase linearity. The filter
could be packaged in a 0.5-cm X 0.5-cm x 0.2cm volume.
Other areas of interest are (a) mass loading
effects (change in velocity, phase, or mode of a
signal transversing a region coated with a deposited material (s) ), (b) velocity perturbations
caused by applied magnetic and electric fields,
and (c) the influence of SAW on the adhesion of
deposited films. The change of velocity with
applied magnetic field has been used to make
variable phase shifters for communications subsystems. We plan to incorporate this effect into
similar components for evaluation. The authors
have observed that surface waves propagating in
a substrate during deposition result in increased
Volume 15, Number 3
film adhesion to that substrate; thus it might be
possible to adhere normally incompatible materials. Little has been done in this area, but it
suggests a phenomenon for future investigation.
The mass loading effect has been applied by the
authors in making a thin-film deposition rate and
thickness monitor. It consists of a 30-MHz twotransducer SAW delay line on a temperaturestable quartz substrate (ST cut) . The monitor
package has a series of 12 apertures exposing
segments of the path between the two transducers
to an evaporant stream. For maximum sensitivity
and range, a different aperture (virgin underlying
surface) is selected for each deposit; the same
aperture can be used again if excessive mass « 8
{L m of aluminum equivalent) has not accumulated.
An exploded view of the monitor head is shown
in Fig. 20.
.
This instrument measures changes in surface
velocity due to free surface loading. It is a linear
phenomenon proportional to the total mass per
·,
W
"
t
f
Y/Y
0/~
'"
I
I
lider r
I
Slider support
and electrode
ma~
' Aperture
I
mask
I
!
1
I
:
I
I
I
I
•
I
e
I
I
I
Electrode (lOput)~
I t .~~~~...~'/"
I :
Electrode (reference)
j
f
I
Interdigitsl
transducer
. ~ Piezoelectric
I substrate
!Conductor
I jpattern
I Substrate
I ,~=
(output)
Fig. 2~SAW thickness and rate monitor assembly
drawing.
21
unit area of the film layer. The resulting phase
difference, ¢ d, between a "free" wave and
"loaded" wave traversing a region of length 1 is
c/>d
27rfl
(l - VIi V L ) ,
V,
=-
where V, is the free surface velocity, V L is the
loaded surface velocity, and f is the operating frequency.
The phase shift due to mass loading is monitored by comparing, by means of a phase detection
or vector voltmeter, the phase difference between
two parallel paths, one exposed to the evaporant
stream and the other not. Figure 21 shows a typical
response using chromium. When depositing conductors on the monitor's piezoelectric sensor, there
is a large initial phase change due to the shorting
of the surface fields. The subsequent phase
changes are then due to the mass loading effect.
The trace in Fig. 21 shows that, of the approximately 14 0 of total phase shift, 1.5 0 is associated
with surface shorting. Using the total film thickness
( determined by an optical interferometer) of
289 nm, we obtain a linearized sensitivity for the
mass loaded region of 23.1 nm per degree of
phase shift. Since the phase can be read to at
least ±0.2 °, a conservative resolution for this
device (i.e. , at f = 30 MHz with an aperture
0.127 cm x 0.406 cm) of ± 4.5 nm of chromium
is predicted.
Figure 22 illustrates the effect of gold as the
mass loading material. With a film thickness of
570 nm, the total recorded phase shift was 102.3 0 •
The initial offset was 1.7 0 , yielding a linearized
Open shutter
Time(s)
Fig. 21-SAW monitor chromium evaporation (phase
shift versus time).
Close shutter
Fig. 22-SAW monitor gold evaporation (phase shift
versus time).
22
sensitivity of 5.7 nm per degree and a resolution
of ± 1.0 nm with gold. The sensitivity for gold is
four times as great as that for chromium (the
phase shift is four times as great for a given
thickness of gold as for the same thickness of
chromium). Since the density of gold is 19.3
gm/ cm 3 and the density of chromium is 7.2
gm/ cm 3 , this suggests a sensitivity ratio of 2.68.
The discrepancy may be resolved by considera. tions relating to the experimental conditions.
However, since repeatability and proof-of-principle were of primary interest, we stressed qualitative rather than quantitative behavior. In passing, the resolution of this monitor could easily be
increased by an order of magnitUde by increasing
both the frequency of operation and mass-loaded
pathlength.
A particularly useful property of the SAW
thickness monitor is its ability to record effective
(average) thickness before formation of a continuous film. This should prove helpful to those
investigating the physics of film nucleation.
Future plans are to integrate the frequency
source and phase detector so that only a DC
power supply and DC readout/ recorder would be
required for operation.
7. Summary
In summary, the simplified analytical descriptions along with the detailed applications section
should provide insight into the design and structuring of useful SAW devices. It is evident that,
while SAW technology is conceptually simple, it
is mathematically complex, especially if known
higher order effects are to be incorporated. Computer design is required for all but the most
elementary devices. Although the range of applications for SAW technology is quite large, with
new areas being continually developed (e.g. ,
APL's SA W thickness monitor), it is not all
encompassing. In fact SA W technology has
steadily progressed (determined by systems applications and field use) only in such areas as dispersive delay lines, bandpass filters , and tapped
delay lines. Part of this restricted use stems from
the lack of understanding of SAW technology by
systems designers and part from technology limitations. We trust that this article has created a basic
understanding of microsonics and provided the
system designer with another useful tool in his
"bag of tricks."
APL Te chnical Digest