Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Immunity-aware programming wikipedia , lookup
Power inverter wikipedia , lookup
Three-phase electric power wikipedia , lookup
Audio power wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Wireless power transfer wikipedia , lookup
Electric power system wikipedia , lookup
Stepper motor wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power over Ethernet wikipedia , lookup
Fault tolerance wikipedia , lookup
Buck converter wikipedia , lookup
Electrification wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Life-cycle greenhouse-gas emissions of energy sources wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power electronics wikipedia , lookup
Distribution management system wikipedia , lookup
Alternating current wikipedia , lookup
Mains electricity wikipedia , lookup
Power engineering wikipedia , lookup
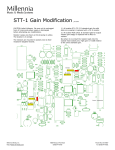
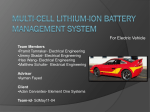
ABB industrial drives Application guide ACS880-01 drives and ACS880-04 drive modules Common DC systems List of related manuals Drive hardware manuals and guides Code (English) ACS880-01 hardware manual 3AUA0000078093 ACS880-01 quick installation guide for frames R1 to R3 3AUA0000085966 ACS880-01 quick installation guide for frames R4 and R5 3AUA0000099663 ACS880-01 quick installation guide for frames R6 to R9 3AUA0000099689 ACS880-01 assembly drawing for cable entry boxes of IP21 3AUA0000119627 frames R5 to R9 ACS880-04 drive modules (200 to 560 kW, 300 to 700 hp) hardware manual 3AUA0000128301 ACS880-04 drive modules (200 to 560 kW, 300 to 700 hp) quick installation guide 3AUA0000128301 ACS-AP assistant control panels user’s manual 3AUA0000085685 Drive firmware manuals and guides ACS880 primary control program firmware manual 3AUA0000085967 Quick start-up guide for ACS880 drives with primary control program 3AUA0000098062 Option manuals and quides ACS880-01 drives and ACS880-04 drive modules Common 3AUA0000127818 DC systems application guide Manuals and quick guides for I/O extension modules, fieldbus adapters, etc. You can find manuals and other product documents in PDF format on the Internet. See section Document library on the Internet on the inside of the back cover. For manuals not available in the Document library, contact your local ABB representative. ACS880-01 manuals ACS880-04 manuals Application guide ACS880-01 drives and ACS880-04 drive modules Common DC systems Table of contents 2014 ABB Oy. All Rights Reserved. 3AUA0000127818 Rev B EN EFFECTIVE: 2014-04-17 5 Table of contents List of related manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1. Introduction to the manual Contents of this chapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Applicability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Safety instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Target audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Contents of the manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Related documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Categorization by frame size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Quick planning guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Terms and abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2. Operation principle and hardware description Contents of this chapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Operation basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 Overview of the common DC system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Overview diagram of the common DC system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Benefits of the common DC system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Challenges of the common DC system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Overview diagram of the drive main circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Charging circuit types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Type A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Type B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Brake chopper types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3. Planning – basics Contents of this chapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Defining the DC link duty cycle and key variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Defining the DC link duty cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 DC link duty cycle diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 DC link key variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 Selecting the drives which are connected to AC power line . . . . . . . . . . . . . . . . . . . . . . 21 The selection rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 Calculating the rectifier power capacity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 Verifying the charging capacity of the common DC system . . . . . . . . . . . . . . . . . . . . 22 Checking the total charging resistance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Checking the peak AC current at charging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 Checking the charging energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 Handling the surplus energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 Defining the energy absorbing capacity of the common DC link . . . . . . . . . . . . . . . . 26 Defining the maximum DC link voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 Selecting the brake choppers and resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 Brake chopper selection formulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 6 Brake resistor selection formulas - system with one brake chopper . . . . . . . . . . 28 Brake resistor selection formulas - system with several brake choppers and resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 4. Planning – additional instructions Contents of this chapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Requirements for the AC input connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Constructing the DC link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Selecting the fuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Selecting the AC input fuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Selecting the DC fuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Phase loss protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Selecting the power cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DC contactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DC link separation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Brake resistor protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Electromagnetic Compatibility (EMC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Connecting the Ready and Start enable signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Setting the drive parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 31 31 32 32 32 33 33 34 34 34 35 36 37 5. Technical data Contents of this chapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Rectifier power capacity (Prec,ave and Prec,max) . . . . . . . . . . . . . . . . . . . . . . . . . . . . Power correction factor (k) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frames R1 to R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frames R5 to R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frames R10 to R11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DC contactors between the drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frames R1 to R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frames R5 to R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frames R10 to R11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Charging resistance values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Charging circuit Er values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DC link capacitance values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Brake chopper power ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DC voltage limits of the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DC fuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 40 41 41 41 42 42 42 42 42 43 43 43 44 45 46 Further information Product and service inquiries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Product training . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Providing feedback on ABB Drives manuals . . . . . . . . . . . . . . . . . . . . . . . Document library on the Internet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .......... .......... .......... .......... 47 47 47 47 Introduction to the manual 7 1 Introduction to the manual Contents of this chapter This chapter contains information on this manual and a quick guide for planning a common DC system. Applicability This manual is applicable with the ACS880-01 drives and ACS880-04 drive modules. Safety instructions Obey the safety instructions in the drive’s hardware manual. Target audience This manual is written for people who plan common DC systems. We expect the reader to be a qualified electrical engineering professional. Contents of the manual The chapters in this manual are: • Introduction to the manual • • • • Operation principle and hardware description Planning – basics Planning – additional instructions Technical data. 8 Introduction to the manual Related documents See section List of related manuals on page 2. Categorization by frame size Some information in this manual is only valid for certain drive frame sizes. Such information includes the frame size indication, for example, frame R1. The type designation label of the drive shows the frame size. The frame size for each drive type is given in the drive hardware manual. Quick planning guide No. Step 1. Define a duty cycle diagram for each motor (shaft power). Select the motors and drives as usual with the DriveSize PC tool by ABB. Do not consider the common DC system yet. 2. Define a DC link duty cycle for the common DC system, and define the key variables Pmot,ave, Pmot,max , Pgen,ave and Pgen,max. See section Defining the DC link duty cycle and key variables on page 18. 3. Select the drives that you will connect to the AC power line. See section Selecting the drives which are connected to AC power line on page 21. 4. Define the means to handle the surplus DC link energy (motor braking energy). See Handling the surplus energy on page 25. 5. Design the construction of the common DC link. See section Constructing the DC link on page 31. 6. Select the fuses and phase loss guards. See section Selecting the fuses on page 32 and section Phase loss protection on page 33. 7. Examine the need for DC contactors. If needed, select them. See section DC contactors on page 34. 8. Plan the interlocking and safety. • See Connecting the Ready and Start enable signals on page 36. • Consider the use of safety circuits (such as emergency stop or Safe torque off) or control signal interlocking for safe and reliable operation. 9. Select the measures necessary for the EMC. See section Electromagnetic Compatibility (EMC) on page 35. 10. Repeat all design steps to verify the design. Introduction to the manual 9 Terms and abbreviations Term / abbreviation Description AVR Automatic voltage regulator EMC Electromagnetic compatibility Motoring mode Motor operation mode in which the motor rotates the load and takes power from the drive DC link (normal operation). Generating mode Motor operation mode in which the motor decelerates (brakes) the load and generates energy back to the drive DC link. This effect is also seen when the load is held at a fixed speed, but the mechanical load is trying to “pull” the motor to a higher speed, sometimes referred to as overhauling. Overhauling loads return energy to the DC link as well. Note: The symbols used in the equations and formulas are explained in the context of use. 10 Introduction to the manual Operation principle and hardware description 11 2 Operation principle and hardware description Contents of this chapter This chapter contains a description of a common DC system. It also describes the drive features which are relevant in a common DC system. 12 Operation principle and hardware description Operation basics The main circuit of the drive consists of a rectifier, a DC link and an inverter. The rectifier (input bridge) converts the alternating current and voltage to direct current and voltage for the DC link. The DC capacitors in the DC link smooth the ripple and form a steady energy and power supply for the inverter. The inverter converts the intermediate circuit DC power to AC power for the motor. From a common DC system point of view, the motor has two main operation modes: the motoring mode and the generating mode. In the motoring mode, the motor rotates the machinery. The energy flows from the AC power line to the motor through the rectifier, DC link and the inverter. In the generating mode, the machinery rotates the motor. This is the case for example when a hoist motor of a crane lowers a load (overhauling load). To keep the rotation speed steady, the motor brakes. During the braking, the motor generates energy back to the inverter which then conveys the energy further to the DC link. RL1 V c a L3 1 U b L2 ~3 UDC+ R+ UDC- In the generating mode the DC capacitors are charged by the inverters and the DC link voltage starts to rise. To prevent an excessive voltage rise, the drive must convey the surplus energy away from the DC link. There are three options: to convey the energy to the AC power line, to a brake resistor or to another drive. For the first option you need to have a special type of drive in use, a regenerative drive. If you have an ordinary drive with a rectifier (diode input bridge), regeneration is not possible so only the two other options remain. If you connect a brake chopper and resistor to the DC link, you can dissipate the energy in the resistor as heat. If you connect the DC link of the drive to another drive, you can use the surplus energy for charging the DC capacitors of the other drive and use the energy to rotate its motor. This is a common DC system. 2 No. Description 1. AC power line 2. Rectifier (input bridge) 3 M ~3 W 4 3. DC link including DC capacitors (a), its charging circuit (b) and brake chopper (c) 4. Inverter 5. Motor 5 Operation principle and hardware description 13 Overview of the common DC system In a common DC system, you connect the DC links of several drives together in order to share their DC link energy storages. In addition to this basic configuration, there is a wide variety of additional choices with which you can affect the performance of the system. For example, in certain applications you can: • connect only one of the drives to the AC power line, and supply the other drives only through the common DC link • connect a shared brake chopper and resistor to the common DC link to absorb the occasional surplus energy pulses that you cannot use in the drives • connect one regenerative drive to a common DC link to convey the surplus motor braking energy pulses to the AC power line instead of brake resistors • supply the DC link from a separate DC source. Overview diagram of the common DC system The diagram below shows an example of a common DC system. 1 2 3 4 5 1 AC power line 2 Common DC link 3 Drive 4 Motor 5 Brake resistor 14 Operation principle and hardware description Benefits of the common DC system Benefits of the common DC system: • You can save energy by using the braking energy of one drive in the others - less energy needs to be taken from the AC power line. • DC capacitors of all drives form a high-capacity energy storage that can absorb short braking pulses of individual drives without a need for a brake chopper and resistor. • If you need brake choppers and resistors, they can be optimized for the whole system. You do not have to use the chopper of every drive. • You do not necessarily need to connect every drive to the AC power line. Challenges of the common DC system Challenges of the common DC system: • You cannot operate any of the drives in the common DC system if one of the drives connected to the AC power line has an active fault. See section Connecting the Ready and Start enable signals on page 36. • If you have drives with different type of charging circuits in the system, and you want to connect them to AC power line, you must add extra contactors to the system and arrange their control: For power up and charging, you must disconnect the DC links of the drives which have different type of charging circuits. You can connect the DC links together only after charging. See sections Charging circuit types on page 15 and Charging resistance values on page 43. • You must make sure that the load imbalance between the drives that are connected to the AC power line is as small as possible. There is always slightly unequal AC input current distribution due to differences in the input cables, chokes and input bridges’ forward bias characteristics. If the voltage reduction over the input cable, rectifier and chokes is not the same in all drives, more current will flow through the rectifier which has the lowest voltage reduction. • You must make sure that the common DC system complies with the relevant regulations and directives. The compliance of individual drives does not guarantee or cover the compliance of the common DC system. • If you supply the drives from a totally separate DC source, the DC source: • • must be capable of powering the drives when motoring, must be protected to prevent regeneration onto the DC from causing any damage, or from effecting the devices supplying the DC source (for example AVR systems on generators). Operation principle and hardware description 15 Overview diagram of the drive main circuit The overview diagrams below show the main circuits of the drive modules. The differences between the drive modules, in regards of the use of the drives in a common DC system, are the charging circuit and brake chopper designs. RL1 UDC+ R+ UDC- R1, …, R4 1 L2 U V 2 W L3 L2 BR- 1 L1 UDC+ R+ UDC- R5, …, R11 2 V W L3 1 2 U Charging resistor Brake chopper Charging circuit types Type A Charging resistor is in the DC link (frame sizes R1 to R4). Type B Charging resistor is in parallel with the input bridge (frame sizes R5 and larger). Brake chopper types • • Brake chopper is included as standard in frame sizes R1 to R4. Brake chopper is a factory-installed option for frame sizes R5 and larger (option +D150). 16 Operation principle and hardware description Planning – basics 17 3 Planning – basics Contents of this chapter This chapter contains the basics of planning a common DC system. See section Quick planning guide on page 8 for a summary of planning steps. 18 Planning – basics Defining the DC link duty cycle and key variables Defining the DC link duty cycle 1. Define the DC link duty cycle for each drive. See section DC link duty cycle diagram on page 19. Use the duty cycle diagram of the motor shaft power and: • Add the inverter and motor losses during the motoring mode of the motor. • Subtract the inverter and motor losses during the generating mode of the motor. Inverter losses Pmot = keff × Pm Motor losses Pmot Pgen = Pm n Pdc Pmot Pgen Pm T k eff T×n Pm [kW] = keff Pm 9550 Efficiency factor (1/efficiency) to include drive and motor losses. If not known, value 1.25 can be used Motor shaft speed [rpm] DC link power Power that the motor takes from the DC link Power that the motor supplies to the DC link Motor mechanical shaft power Torque [Nm] on motor shaft 2. Sum the DC link duty cycle diagrams of the individual drives to one common DC link duty cycle diagram for the common DC system. See section DC link duty cycle diagram on page 19. 3. On basis of the common DC link duty cycle diagram, define the key variables Pmot,ave, Pmot,max, Pgen,ave and Pgen,max for the whole system. See section DC link key variables on page 19. Planning – basics 19 DC link duty cycle diagram ~ Pdc ~ Pmot Drive a t Pgen Pdc Pmot a b Drive b c t Pgen Pdc Pmot Pgen M M Pmot t Drive c M Pgen Pdc Pmot Total t Pgen DC link key variables c M b ~ M a ~ M Pbr Prec Pgen Pmot 20 Planning – basics Symbol Name Information Pmot Motoring power Power that the motors take from the common DC link Pmot,ave Average motoring power Average power that the motors take from the common DC link. See the duty cycle diagram of the common DC link. Note: For long cycles times, define Pmot,ave over the worst-case 3 minutes time window. Pmot,max Maximum motoring power Maximum power that the motors take from the common DC link. See the duty cycle diagram of the common DC link. Pgen Generating power Power that the motors supply to the common DC link Pgen,ave Average generating Average power that the motors feed to the common DC link when they power are in generating mode (braking the load). See the duty cycle diagram of the common DC link. Note: If you will use the brake choppers of the drives in the system, determine Pgen,ave over the worst-case 30 seconds time window. Pgen,max Maximum generating power Maximum power that the motors feed to the common DC link when they are in generating mode (braking the load). See the duty cycle diagram of the common DC link. Prec Rectifier power Power that the drive input bridges (rectifiers) feed to the common DC link. See section Selecting the drives which are connected to AC power line on page 21 for the calculation instructions. Prec,ave Average rectifier power capacity The drives that are connected to the AC power line can feed this average power to the common DC link. Prec,max Maximum rectifier power capacity The drives that are connected to the AC power line can feed this power to the common DC link at the maximum. Pbr Braking power Surplus power that the brake resistors take from the common DC link. (Alternatively: Power that the drive feeds to the AC power line if a regenerative type of drive is in use.) See section Handling the surplus energy on page 25. Pbr,cont Continuous braking Continuous braking power that the brake resistors take from the power common DC link. The braking is continuous if the braking time exceeds 30 seconds. Pbr,max Maximum braking power Maximum braking power that the brake resistors take from the common DC link. Brake choppers withstand this braking power for 5 second within every minute. Planning – basics 21 Selecting the drives which are connected to AC power line This section contains instructions for selecting the drives which are connected to the AC power line. However, you can also connect more drives, for example, for backup reasons. The selection rules 1. At the very least, connect the drive with the highest power rating to the AC power line. Then the second largest, etc. until both the rectifier power capacity and charging capacity of the system are high enough. 2. Make sure that you connect only the allowed combination of drives to the AC power line. See section Power correction factor (k) on page 41. 3. Make sure that you have enough rectifier power capacity in the system. See subsection Calculating the rectifier power capacity on page 21. 4. Make sure that you have enough charging capacity in the system. See section Verifying the charging capacity of the common DC system on page 22. Calculating the rectifier power capacity The drives which you connect to the AC power line must supply the rectifier power for the common DC link, and further to the motors. Make sure that the system complies with these formulas: Prec,ave > Pmot,ave Prec,max > Pmot,max Use these equations to calculate Prec,ave and Prec,max: Prec,ave = Prec,ave1 + k × (Prec,ave2 + Prec,ave3 +….) Prec,max = Prec,max1+ 0.9 × k × (Prec,max2 + Prec,max3 +….) k Pmot,ave Pmot,max Prec, ave Prec, ave1 Prec,ave2 Prec, max Prec, max1 Prec,max2 Power correction factor for a common DC system. See section Power correction factor (k) on page 41. Average motoring power of the common DC system during the worst 3 minutes time window. See section DC link key variables on page 19. Maximum motoring power of the common DC system. See section DC link key variables on page 19. Average rectifier power capacity of the common DC system. See section DC link key variables on page 19. Average rectifier power capacity of drive 1. Drive 1 has the highest power rating of the drives which are connected to AC power line. See section Rectifier power capacity (Prec,ave and Prec,max) on page 40. Average rectifier power capacity of drive 2. Drive 2 has the second highest power rating of the drives which are connected to AC power line. See section Rectifier power capacity (Prec,ave and Prec,max) on page 40. Maximum rectifier power of the common DC system allowed for 10 s. See section DC link key variables on page 19. Maximum rectifier power capacity of drive 1. See section Rectifier power capacity (Prec,ave and Prec,max) on page 40. Maximum rectifier power capacity of drive 2. See section Rectifier power capacity (Prec,ave and Prec,max) on page 40. 22 Planning – basics Example 1 Common DC system: The DC links of three converters ACS880-01-11A0-5, 5.5 kW (frame size R1), ACS880-01-034A-5, 18.5 kW (frame size R3) and ACS880-01-034A-5, 18.5 kW (frame size R3) are connected together. The input terminals of the 5.5 kW converter are left unconnected. Calculating the rectifier power capacity According to the table, k = 0.9 when two converters of frame size R3 are connected to the AC power line, and Prec,ave becomes: Prec,ave = 18.5 kW + (0.9 ×18.5 kW) = 35.15 kW Example 2 Common DC system: The DC links of three converters ACS880-01-124A-5, 75 kW (frame size R6), ACS880-01-180A-5, 110 kW (frame size R7) and ACS880-01-414A-5, 250 kW (frame size R9) are connected together. All three converters are connected to the AC power line. Calculating the rectifier power capacity According to the table, k = 0.9 when converters of frame size R6 and R7 are connected to the AC power line, and k = 0.3 when converters of frame size R6 and R9 are connected to the AC power line. The lowest factor is used in the calculations, that is, k = 0.3, and Prec,ave becomes: Prec,ave = 250 kW + (0.3 × 110 kW) + (0.3 × 75 kW) = 305.5 kW Verifying the charging capacity of the common DC system After you select the drives that you will connect to the AC power line, you must verify that there is enough charging capacity available. Select the appropriate verification method and obey the related instructions: 1. If you only use drives with Type A charging circuit, make sure that both of these conditions are true: • The total charging resistance is high enough. See section Checking the total charging resistance on page 23. • 2. The fuses, main contactor and other AC line-side components can withstand the peak current during the charging. See section Checking the peak AC current at charging on page 24. If you use drives with Type B charging circuit, obey the instructions in subsection Checking the charging energy on page 24. Note: If you use both drives with Type A and Type B charging circuits and you connect only Type B drives to the AC power line, select the verification method number 2 above. Note: If you use both drives with Type A and Type B charging circuits AND you connect both types of drives to the AC power line, you must separate the DC links of those drives from each other during the charging. Then you actually have two (or several) separate DC links from the charging capacity point of view, and you can verify the charging capacity of each DC link separately. Select the appropriate verification method (number 1 or 2) above. Planning – basics 23 Checking the total charging resistance Use this method for verifying the charging capacity if there are only drives with Type A charging circuits in the common DC system. The total charging resistance must comply with this formula: Rtot > Rmin Rtot Rmin Calculated total charging resistance for the common DC system. Minimum charging resistance allowed for the common DC system. Calculate the value Rtot as follows: 1 Rtot = 1 Ra + 1 Rb + + … 1 Rn Charging resistance of drive a in the common DC system. See section Charging resistance values on page 43. Charging resistance of drive b in the common DC system. See section Charging resistance values on page 43. Ra Rb Define the value Rmin as follows: 1. If you connect only one drive to the AC power line, Rmin is equal to the minimum charging resistance defined for that drive. See section Charging resistance values on page 43. 2. If you connect several drives to the AC power line, calculate Rmin. Use this equation: 1 Rmin = 1 Rmin,1 Rmin,1 Rmin,2 + 1 Rmin,2 + + … 1 Rmin,n Minimum charging resistance of drive 1 connected to the AC power line. See section Charging resistance values on page 43. Minimum charging resistance of drive 2 connected to AC power line. See section Charging resistance values on page 43. 24 Planning – basics Checking the peak AC current at charging If you only have drives with Type A charging circuits in the common DC system, make sure that the AC line-side components (fuses, contactors, etc.) can withstand the peak current at charging. Use the rule of thumb below, or calculate the peak current and compare it to the allowed peak current data for the AC line-side components. Rule of thumb: There can not be more than three drives which are not connected to the AC power line per one connected drive. Calculation: Calculate the peak current with this equation: I ac , peak = Iac,peak U ac R tot 2 × U ac Rtot Peak AC current at charging. AC input voltage. Total charging resistance (see page 23). Checking the charging energy Use this method to verify the charging capacity if there are drives with Type B charging circuit in the common DC system. The drives that you connect to the AC power line must supply the total charging energy for all of the DC capacitors in the common DC system at the power up. The charging capacity must comply with this formula: Erconnected > Etot Erconnected Etot Total energy pulse that the charging resistors of the drives connected to the AC power line can withstand. See subsection Charging circuit Er values on page 43. Total charging energy of the DC capacitors of all drives in the common DC system. Calculate the charging energy for a drive and the common DC system with these equations: Etot = Ea + …+ En = 1/2 × (CDCa +…+CDCn) × (1.35 × Unet)2 E1 = 1/2 × CDCa × (1.35 × Unet)2 C DC Ea U net Capacitance of drive DC capacitors. CDCa is the capacitance of drive a. See subsection DC link capacitance values on page 43. Charging energy of drive a. Main voltage of the AC power line which the common DC system is connected to. Planning – basics 25 Example 1 Common DC system: The DC links of three converters ACS880-01-169A-3 (frame size R7), ACS880-01-246A-3 (frame size R8) and ACS880-01-430A-3 (frame size R9) are connected together. The main supply voltage is 400 V. Questions: Is the charging capacity of the largest drive sufficient for the whole common DC system? Can you connect only the largest drive to the AC power line and leave the others unconnected? Calculations: The total charging energy of the capacitors is: Etot = 1/2 × (3800 μF + 5600 μF + 8800 μF) × (1.35 × 400 V)2 × 10-6 = 2653 J The charging capacity of the ACS880-01-430A-3 (frame size R9) is sufficient since: Er = 5600 J > 2653 J (Etot) Conclusion: It is sufficient to connect only the largest drive to the AC power line. Example 2 Common DC system: The DC links of two ACS880-01-240A-5 converters (frame size R8) and three ACS880-01-361A-5 converters (frame size R9) are connected together. The main supply voltage is 500 V. Question: How many frame size R9 drives you must connect to the AC power line to supply the charging energy for the whole system? Calculations: The total charging energy of the DC link capacitors is: Etot = 1/2 × (2 ×5600 μF + 3 ×8800 μF) × (1.35 ×500 V)2 ×10-6 = 8566 J The charging capacity of the ACS880-01-361A-5 (frame size R9): One frame size R9 drive: Er = 5600 J < 8566 J (Etot) Two frame size R9 drives: 2 × Er = 112 000 J > 8566 J (Etot) Conclusion: It is sufficient to connect two frame size R9 drives to the AC power line. Handling the surplus energy Background When a motor brakes, it generates energy to the DC link. If the other drives in the common DC system cannot use the energy at the same time, the DC link voltage starts to rise. The capacitors in the DC link can absorb a small energy pulse. If that is not enough and the voltage keeps rising, you must convey the surplus energy to the braking chopper and resistors, or to the AC power line. For the latter case you need a special type of drive, a regenerative drive. For more information of the electrical braking, see Technical guide No. 8 Electrical braking in ABB Drives - Technical Guide Book (3AFE64514482 [English]). This sections contains: • instructions in defining the energy absorbing capacity of the common DC link • instructions in dimensioning brake choppers and resistors. This section does not contain instructions in selecting the regenerative drive. 26 Planning – basics Defining the energy absorbing capacity of the common DC link Use formula 1 below to examine if the common DC link capacitors can absorb the surplus energy of the common DC system. If the condition is true, the energy absorbing capacity is sufficient and you do not need a brake chopper and a resistor to handle the surplus energy. Wdc > Egen (1) Wdc = (Cdca + Cdcb + Cdcc… + Cdcn) 2 × (Udc,lim2 - Udc2) T Egen = ʃPgen(t) ×dt = Σ((Pg1 × t1) + … + (Pgn × tn)) 0 Udc,lim = 2 × Uac P Drive a duty cycle t P a b c Drive b duty cycle t P M M M Drive c duty cycle t P Common DC duty cycle Pg1 T C dca C dcb Egen Pg1 Pg2 Pgen(t) T tg1 tg2 U ac U dc U dc,lim Wdc tg1 tg2 Pg2 t Capacitance value of drive a Capacitance value of drive b Generating energy of the common DC link during one duty cycle Generating power of the common DC link during time tg1 Generating power of the common DC link during time tg2 Generating power of the common DC link as a function of time over one duty cycle. Duty cycle time Duration of generating power Pg1 Duration of generating power Pg2 AC power line voltage Nominal DC link voltage. See section DC voltage limits of the drive on page 45. Maximum DC link voltage. See section Defining the maximum DC link voltage on page 27. Energy absorbing capacity of the common DC link Planning – basics 27 Defining the maximum DC link voltage The table below shows how you can define the maximum DC link voltage Udc,lim. See section DC voltage limits of the drive on page 45 for the explanation of the symbols. Overvoltage control1) Brake choppers and resistors Udc,lim Enabled Not in use Udc,lim = UDC,ovc Disabled Not in use Udc,lim < UDC,ovt 2) Disabled In use Udc,lim = UDC,brcl 3) 1) Parameter 30.30 Overvoltage control in the ACS880 primary control program. 2) You must have some margin to the limit to avoid fault trips. 3) The resistor braking starts when the voltage exceeds the limit. Selecting the brake choppers and resistors You must use brake choppers and resistors in the common DC system if the DC link capacitors cannot absorb the surplus energy, and there is no regenerative drive in the system. Depending on the drive frame size, the brake chopper is either a standard or optional device. See section Brake chopper types on page 15. If the chopper is available as an option, you can order it from ABB as factory-installed. You must acquire and install the brake resistors separately. See the drive hardware manual for ABB brake resistors for each drive. Use can use either the default ABB brake resistors defined for each drive or other resistors that meet the selection criteria. Select the choppers and resistors as follows: 1. Select the choppers: Examine if the chopper load capacity of the drive with the highest power rating is high enough for the surplus power of the common DC link. See section Brake chopper selection formulas on page 28. • • 2. If the chopper load capacity of one drive is not enough, use also the chopper with the second highest power rating, etc. until the total load capacity meets the criteria. Select the brake resistors: If you plan to use one chopper and resistor only, either verify the default ABB brake resistor selection, or select a user-defined resistor. See section Brake resistor selection formulas - system with one brake chopper on page 28. If the resistor does not meet the criteria, try another resistor, or take the next biggest chopper and its resistor in use as well. • • If you plan to use several choppers and resistors, verify each resistor selection. See section Brake resistor selection formulas - system with several brake choppers and resistors on page 29. If a resistor does not meet the criteria, try another resistor, or take the next biggest chopper and its resistor in use as well. Repeat the verification until each resistor meets the criteria. 28 Planning – basics Brake chopper selection formulas Use these formulas to select the choppers and verify the selection: Pbr,cont > Pgen,ave Pbr,max > Pgen,max Pbr,cont = Pbr,cont1 + 0.8 × (Pbr,cont2 + Pbr,cont3 +…) Pbr,max = Pbr,max1 + 0.7 × (Pbr,max2 + Pbr,max3 +…) Pgen,ave Pgen,max Pbr,cont Pbr,max Pbr,cont1 Pbr,max1 Average generating power of the common DC link. See DC link duty cycle diagram on page 19. Maximum generating power of the common DC link. See DC link duty cycle diagram on page 19. Continuous braking power of the common DC link. The braking is continuous if the braking time exceeds 30 seconds. Maximum braking power of the common DC link. Choppers withstand this braking power for 5 second within every minute. Continuous braking power of the chopper 1. See section Brake chopper power ratings on page 44. Maximum braking power of the chopper 1. See section Brake chopper power ratings on page 44. Brake resistor selection formulas - system with one brake chopper Use these formulas to select the brake resistor, and to verify the resistor selection: Rbr > Rmin Rbr < 2 Udc,h Pgen,max Er > ʃPgen(t) ×dt = Σ((Pg1 × t1) + … + (Pgn × tn)) PN,r > Pgen,ave Er Pg1 Pgen(t) Pgen,max PN,r R br R min tg1 U ac U dc,h Energy pulse that the resistor can withstand and dissipate during a predefined period. See the drive hardware manual (ABB brake resistors) or resistor data sheet. Generating power of the common DC link during time tg1. See tg1 and the graph in section Defining the energy absorbing capacity of the common DC link on page 22. Generating power of the common DC link as a function of time over one duty cycle. Maximum generating power of the common DC link. Nominal power of the brake resistor Resistance of the brake resistor Minimum resistance of the brake resistor that you can use with the drive. See the drive hardware manual. Duration for generating power Pg1. See the graph in section Defining the energy absorbing capacity of the common DC link on page 22. AC power line voltage = 2.1 × U ac (high DC link voltage value but clearly below the trip level) Planning – basics 29 Brake resistor selection formulas - system with several brake choppers and resistors Use these formulas to select the brake resistor for each chopper, and to verify the resistor selection: Rbr(i) > Rbr,min(i) 2 i) < Rbr ( i ) < Pbr ,cont ( i ) (P br ,cont1 (P Rbr(i) Rbr,min(i) Pbr,cont(i) Pg1 Pgen(t) Pgen,max PN,r(i) Pbr,contr(i) Pbr,max(i) tg1 Uac Udc,h + Pbr ,cont 2 + ...) Pbr ,cont ( i ) br ,cont1 Er(i) U dc Pbr , max( i ) × Pgen ,max ( Pbr ,max 1 + Pbr ,max 2 + ...) + Pbr ,cont 2 + ...) × Pgen dt < E R ( i ) × Pgen ,ave < PN , R ( i ) Energy pulse that individual brake resistor i can withstand and dissipate during one load cycle. See the drive hardware manual (ABB brake resistors) or resistor data sheet. Resistance of individual brake resistor i. See the drive hardware manual (ABB brake resistors) or resistor data sheet. Minimum resistance of brake resistor i that you can use with individual drive (brake chopper). See the drive hardware manual. Continuous braking power of individual brake chopper. See the drive hardware manual (ABB brake resistors) or resistor data sheet. Generating power of the common DC link during time tg1. See the graph in section Defining the energy absorbing capacity of the common DC link on page 26. Generating power of the common DC link as a function of time over one duty cycle. Maximum generating power of the common DC link. Nominal power of individual brake resistor i. See the drive hardware manual (ABB brake resistors) or resistor data sheet. Continuous power of brake chopper supplying the individual brake resistor i. See section Brake chopper power ratings on page 44. Maximum power of brake chopper supplying the individual brake resistor i. See section Brake chopper power ratings on page 44. Duration for generating power Pg1. See graph in section Defining the energy absorbing capacity of the common DC link on page 22. AC power line voltage = 2.1 × Uac High DC link voltage value but clearly below the trip level 30 Planning – basics Planning – additional instructions 31 4 Planning – additional instructions Contents of this chapter This chapter contains some additional instructions for planning a common DC system. Requirements for the AC input connection See the drive hardware manual for the electric power network specification of the drive. Supply all drives which you connect to the AC power line from the same transformer. All drives must have equal supply-side impedance. The supply-side impedance is an important parameter which influences the current distribution. Constructing the DC link If the system consists of more than two drives, construct either common DC bus bars or common DC terminals for the whole system. Connect the DC cabling of every drive to this common connection point. Do not use the DC terminals of one of the drives for this purpose, nor chain the DC link from one drive to another. This ensures that the drives terminals do not overheat. 32 Planning – additional instructions Selecting the fuses There must be fuses both at the AC supply side of the drive and at the DC connection. They protect the cabling and limit the drive damage in case of a short circuit. Selecting the AC input fuses Equip every drive which you connect to the AC power line with fuses. The default AC fuses for each drive are given in the drive hardware manual. Obey these guidelines if you select other fuses: • Fuse type: Only use the default fuse types (aR, T, etc.). See the drive hardware manual. • Voltage rating: According to the drive AC voltage rating, except use 500 V fuses for the 380 … 500 V AC supply. • Nominal current of the fuses IF,N ≈ 1.6 × Irec,ave • • Irec,ave is the average rectifying current of the drive. • • Factor 1.6 covers the influence of cyclic load and ambient conditions. If you do not know the average rectifier current of the drive, use the rated input current of the drive instead. See the drive hardware manual. Make sure that the operation time of the fuse is below the limit given for the default fuses. See the drive hardware manual. Selecting the DC fuses Equip every drive with DC fuses. Install a fuse on both DC+ and DC- cable that you connect from the common DC link connection point to the drive. Suitable fuses for each drive type are listed in section DC fuses on page 46. Obey these guidelines if you select the fuses on your own: • Fuse type: aR (ultra-rapid, fast) • Voltage rating: Select according to the nominal DC voltage (UDC). See section DC voltage limits of the drive on page 45. • Nominal current: IF,N ≈ 1.6 x Idc,ave(i) Make sure that the fuses also protect the DC cabling connected to the drive. Idc,ave = Pdc,ave(i) Udc 1.6 Idc,ave Factor which covers the influence of the cyclic load and ambient conditions Average DC link current IF,N Pdc,ave(i) Nominal current of the fuse Maximum average DC link power in the DC connection terminals of the individual drive i. (during a worst case 3 min time window) actual DC link voltage = 1.35 x Uac Udc Planning – additional instructions 33 Phase loss protection We recommend that you use phase loss guard in the AC supplies of the drives which you connect to the AC power line. If one AC fuse blows, the semiconductors of the drives can be overloaded and be damaged if you do not have the phase loss protection. The internal phase loss detection of the drive will not work, as the addition DC capacitors on the system may prevent the DC ripple becoming large enough to be detected internally. Selecting the power cables • • Obey the instructions in the drive hardware manual. • Use shielded DC cables, or only run them inside the cabinet. Ground the cable shield at the other end only. • Make sure that the lengths of the individual input power cables (AC) do not differ by more than 15% from each other. • Make sure that the total cable length of the DC cables between any two drives is no longer than 50 m (164 ft). Size the conductor cross-sectional area of the drive DC cable the same as the conductors of the drive input power cable (AC). 34 Planning – additional instructions DC contactors DC link separation If you connect drives with different type of charging circuits to the AC power line, you must separate their DC link with a DC contactor. The DC links of drives with Type B charging circuit may not be connected to the DC link of drives with Type A charging circuit during the charging. See the table in section Power correction factor (k) on page 41. The contactor must be open during the power up until the separate DC links are charged and the drives are in Ready state. Then you can close the contactor and connect the DC links. Select the DC contactor in the DC link using these values: Udc_max = 1.21 × 1.35 × U1 IdcN = PDC / Udc PDC ≈ Pcont.max IdcN Pcont.max U1 Udc_max Nominal DC current in the DC link Power rating of the larger drive to be separated (See the drive hardware manual.) AC input voltage of the drive Maximum voltage over the contactor in the DC link Brake resistor protection If you use resistor braking, you must make sure that if the chopper fails and it cannot switch off, the system will cut off the power supply for the brake resistor. • If you use the chopper in a drive with Type B charging circuit, and that drive is the only one that you connect to the AC power line, you do not need extra protection: The drive detects the chopper fault, and its input bridge cuts off the power supply from the AC power line to DC link and further to the resistor. • If you use the chopper in a drive with Type A charging circuit, or connect several drives to the AC power line, install a DC contactor between the chopper and brake resistor, and wire the chopper fault relay to open the contactor control circuit after the chopper fault. Select the DC contactor for the chopper using these values: Udc = 1.35 × U1 Ip = (1.25 x Udc) / Rbrake Irms= (Pbr / Rbrake ) ½ Ip Irms Pbr Rbrake U1 Udc Peak current during the resistor braking Nominal rms current during the resistor braking Motor braking power that the resistor must dissipate Resistance of the brake resistor AC input voltage of the drive Voltage over the contactor during the braking Planning – additional instructions 35 Electromagnetic Compatibility (EMC) To ensure that the common DC link system complies with electromagnetic compatibility (EMC) rules and does not interfere with other systems, obey the following guidelines: • Obey the electrical installation instructions in the drive hardware manual. • To minimize the conducted emissions, order a relevant EMC filter option for the drive that will be connected to AC power line. See the drive hardware manual for the possible EMC filter options. • To minimize the radiated emissions: • Keep the power cable runs as short as possible. Especially important is to keep the DC cabling and the brake resistor cabling short. • Make 360-degree grounding of the cable shields at the drive cable connection box, using either a metal gland or the clamps supplied. If you install the drives inside a cabinet, make the 360 degree earthing at the cabinet cable entry. • Use shielded power cables. For more information of the general EMC guidelines, see Technical guide, EMC compliant installation and configuration for a power drive system (3AFE61348280 [English]). Note: ABB has not tested the various common DC systems against the EMC product standard (EN 61800-3:2004) requirements stated for drives. An EMC plan may be required to gain CE compliance. 36 Planning – additional instructions Connecting the Ready and Start enable signals All drives which you connect to the AC power line must be ready (charging complete) before you can start to load any of the drives. If a drive on the common DC system starts its motor too early, it can cause damage to the charging contactor or resistor. To make sure that starting is not possible during the charging: 1. Connect the Ready signals of all drives with the AC power line connection in series and supply the circuit with +24 V from one drive. This becomes the common Ready signal for all drives. Note: Relay output RO1 of the drive indicates the Ready signal in ACS880 primary control program when the Factory macro is selected. If you have another macro or control program in use, or want to use another relay output instead, see the drive firmware manual for the parameter settings (parameter group 10 Standard DI, RO). 2. Connect the common Ready signal to digital input DI6 of all drives. 3. Connect the ground of the 24 V DC supply in all drives to each other (DICOM terminals in ZCU control unit). We also recommend that you separate it from the digital I/O ground (DIOGND terminal) in all drives. (Switch J6 in ZCU control unit.) 4. Set the digital input DI6 as the source for the Start enable signal in the drive control program in all drives. (parameter 20.19 Enable start command in the ACS880 primary control program.) The diagram below shows the control connections with a solid line. 3 3 2 3 XRO1 1 NC 2 COM 3 NO XRO1 1 NC 2 COM 3 NO 3 M ~3 M ~3 XRO1 1 NC 2 COM 3 NO J6: OFF XDI 6 DI6 J6: OFF XD24 1 DIIL 2 +24V 3 DICOM J6: OFF XDI 6 DI6 ZCU Control unit XD24 1 DIIL 2 +24V 3 DICOM ZCU Control unit 3 M ~3 2 ZCU Control unit XDI 6 DI6 XD24 1 DIIL 2 +24V 3 DICOM 2 Planning – additional instructions 37 Setting the drive parameters Check the settings of the drive parameters against the recommendations below. This is not the complete list of settings, just settings for the common DC system to work effectively. The list is valid for the ACS880 primary control program. • Recommendation: Set parameter 99.04 Motor ctrl mode to DTC in all drives. • Set parameter 30.26 Power motoring limit to the maximum motoring power of the drive load cycle. • Set parameter 30.27 Power generating limit to the maximum generating power of the drive load cycle. • When you use a brake chopper: • • • Set parameter 30.30 Overvoltage control to Disable in all drives. Set parameter 43.06 Brake chopper to Enabled with thermal model or Enabled without thermal model in those drives that you use the chopper. Set parameter 31.23 to No action in all drives to prevent unnecessary fault trips. For more information, see the drive firmware manual. 38 Planning – additional instructions Technical data 39 5 Technical data Contents of this chapter This chapter contains the technical data that you need in the planning of a common DC system. 40 Technical data Rectifier power capacity (Prec,ave and Prec,max) Frame Prec,ave Prec,max depending on Uac 208…240 V AC 380…415 V AC 380…500 V AC 600…690 V AC (ACS880-01 -xxxx-2) (ACS880-01/-04 -xxxx-3) (ACS880-01/-04 -xxxx-5) (ACS880-01/-04 -xxxx-7) R1 5.5 7 7 6 - R2 11 13 13 10 - R3 18.5 26 26 24 - R4 30 37 37 32 - R5a 15 - - - 24 R5b 45 63 63 59 54 R6 75 92 92 79 81 R7 110 153 153 144 150 R8 160 228 228 212 208 R9 250 - 317 262 304 R10a 250 - 340 420 - R10b 355 - 420 500 510 500/630 1) - 620 700 850 R11 U ac: AC input voltage. Prec,ave is the average rectifier power capacity of the drive over a 3-minutes time window. The average power taken from AC power line must be lower than this value during any 3-minutes time window. 1) Value 630 applies to 600…690 V AC. Prec,max is the maximum rectifier power capacity of the drive allowed for max. 10 s. The instantaneous power taken from AC power line must never exceed this limit. R5a: ACS880-01 types -07A3-7, -09A8-7, -14A2-7 and -018A-7. R5b: ACS880-01 types -022A-7, -026A-7, -035A-7, -042A-7 and -049A-7. R10a: ACS880-04 types -505A-3 and -460A-5. R10b: ACS880-04 types -585A-3, -650A-3, -583A-5, -635A-5, -330A-7 and -370A-7. Technical data 41 Power correction factor (k) The tables below shows the power correction factor (k) for calculating the sum rectifying capacity of the drives connected to the AC power line. Choose the lowest k factor of the possible choices. The tables also show the combinations of drives that you may connect to the AC power line. Connect only the drives visible in the same table. Connect only combinations which are visible in the same table and which are not marked as prohibited. The other combinations are not allowed. Example for choosing the k: If you connect frames R5, R4 and R2 to the AC power line, possible values for k are: • 0.7 for combination of frames R5 and R4 • • 0.8 for combination of frames R5 and R2 0.8 for combination of frames R4 and R2. Choose the smallest value (0.7) and use it in the calculations. The smaller drive may not be connected to the AC power line. Frames R1 to R5 Frame R1 R2 R3 R1 0.9 0.4 0.9 R4 R5 R2 0.4 0.9 R3 0.9 0.7 0.7 0.8 0.8 0.9 0.6 R4 0.4 0.8 0.6 0.9 R5 0.7 0.8 0.4 0.7 0.9 R7 R8 R9 Frames R5 to R9 Uac = 208…240, 380…415, 380…500 Frame R5 R6 R5 0.9 0.3 R6 0.3 0.9 0.9 0.5 0.3 R7 0.9 0.9 0.7 0.6 R8 0.5 0.7 0.9 0.9 R9 0.3 0.6 0.9 0.9 Uac = 600…690 Frame R5a R5b R6 R7 R8 R9 R5a 0.9 0.9 1 1 0.7 0.9 R5b 0.9 0.9 0.7 0.5 0.2 R6 1 0.7 0.9 1 0.8 0.7 R7 1 0.5 1 0.9 0.9 0.8 R8 0.7 0.2 0.8 0.9 0.9 1 R9 0.4 0.7 0.8 1 0.9 R5a: ACS880-01 types -07A3-7, -09A8-7, -14A2-7 and -018A-7. R5b: ACS880-01 types -022A-7, -026A-7, -035A-7, -042A-7 and -049A-7. 42 Technical data Frames R10 to R11 Frame R10a R10b R11 R10a 0.9 0.7 0.5 R10b 0.7 0.9 0.9 R11 0.5 0.9 0.9 R10a: ACS880 types -505A-3 and -460A-5. R10b: ACS880 types -585A-3, -650A-3, -583A-5, -635A-5, -330A-7 and -370A-7. U ac: AC input voltage. DC contactors between the drives Tables below show when you need a DC contactor between the drives in the DC link. If both frame sizes exist in the common DC system, and both of them are connected to the AC power line, you must have a DC contactor between the DC terminals of these drives. The DC contactor must isolate the drives until charging is complete. Contactor is not needed. X Contactor is needed. The smaller drive may not be connected to the AC power line. Frames R1 to R5 Frame R1 R2 R3 R4 R5 R1 R2 X R3 X R4 X R5 X X X Frames R5 to R9 Frame R5 R6 R7 R10b R11 R8 R5 R6 R7 R8 R9 Frames R10 to R11 Frame R10a R10a R10b R11 R10a: ACS880 types -505A-3 and -460A-5. R10b: ACS880 types -585A-3, -650A-3, -583A-5, -635A-5, -330A-7 and -370A-7. R9 Technical data 43 Charging resistance values R [ohm] Rmin [ohm] R1, R2, R3 Frame 50 16 R4 25 6 R5 20 N/A R6, R7 36 N/A R8, R9 18 N/A R10 3.3 N/A R11 10 N/A R: Charging resistance of the drive module. Rmin : Minimum resistance that the charging circuit can supply (in case the circuit must supply charging current of several drives). Charging circuit Er values Frame Er [J] R5 411 R6 1400 R7 1400 R8 5600 R9 5600 R10 5600 R11 7400 Er: Maximum energy pulse that the charging circuit of the drive can withstand. DC link capacitance values Frame CDC [microF] depending on Uac 208…240 V AC (ACS880-01 -xxxx-2) 380…500 V AC 600…690 V AC (ACS880-01/-04 (ACS880-01/-04 -xxxx-3) -xxxx-5) 380…415 V AC (ACS880-01/-04 -xxxx-7) R1 300 300 300 R2 500 500 500 - R3 1000 1000 1000 - R4 4100 1000 1000 - R5a - - - 350 R5b 6200 1500 1500 700 R6 10500 2600 2600 1200 R7 15300 3800 3800 1700 R8 22500 5600 5600 2500 R9 - 8800 8800 3900 R10 - 15800 15800 5267 R11 - 23700 23700 10533 Uac : AC input voltage. R5a: ACS880-01 types -07A3-7, -09A8-7, -14A2-7 and -018A-7. R5b: ACS880-01 types -022A-7, -026A-7, -035A-7, -042A-7 and -049A-7. - 44 Technical data Brake chopper power ratings Drive type Pbr, Rbr, Drive type Pbr, ACS880ACS880- cont cont min 01[kW] [ohm] 01[kW] Rbr, Pbr, Rbr, min Drive type Pbr, Rbr, Drive type ACS880ACS880cont min [ohm] 01[kW] [ohm] 01- cont min [kW] [ohm] 04A6-2 0.75 65 02A4-3 0.75 78 02A1-5 0.75 78 07A3-7 6 06A6-2 1.1 65 03A3-3 1.1 78 03A0-5 1.1 78 09A8-7 8 18 07A5-2 1.5 65 04A0-3 1.5 78 03A4-5 1.5 78 14A2-7 11 18 10A6-2 2.2 65 05A6-3 2.2 78 04A8-5 2.2 78 018A-7 17 18 16A8-2 4.0 18 07A2-3 3.0 78 05A2-5 3.0 78 022A-7 23 18 24A3-2 5.5 18 09A4-3 4.0 78 07A6-5 4.0 78 026A-7 28 18 031A-2 7.5 13 12A6-3 5.5 78 11A0-5 5.5 78 035A-7 33 18 046A-2 11 12 017A-3 7.5 39 014A-5 7.5 39 042A-7 45 18 061A-2 11 12 025A-3 11 39 021A-5 11 39 049A-7 45 18 075A-2 18.5 6 032A-3 15 19 027A-5 15 19 061A-7 55 13 087A-2 22 6 038A-3 18.5 19 034A-5 18.5 19 084A-7 65 13 115A-2 30 3.5 045A-3 22 13 040A-5 22 13 098A-7 90 8 145A-2 37 3.5 061A-3 22 13 052A-5 22 13 119A-7 110 8 170A-2 45 2.4 072A-3 37 8 065A-5 37 8 142A-7 132 6 206A-2 55 2.4 087A-3 45 8 077A-5 45 8 174A-7 160 6 274A-2 75 1.8 105A-3 55 5.4 096A-5 55 5.4 210A-7 200 4 145A-3 75 5.4 124A-5 75 5.4 271A-7 250 4 169A-3 90 3.3 156A-5 90 3.3 206A-3 110 3.3 180A-5 110 3.3 246A-3 132 2.3 240A-5 132 2.3 293A-3 132 2.3 260A-5 132 2.3 363A-3 160 2 302A-5 160 2.3 430A-3 160 2 361A-5 160 2.3 414A-5 160 2.3 18 Pbr,cont: Continuous braking power of the chopper. The braking is considered continuous if the braking time exceeds 30 seconds. R br,min: The minimum allowed resistance of the brake resistor used with the brake chopper. Note: Pbr,max= UDC,brcl2 / Rbr, min: This is the theoretical maximum braking power which the brake chopper can withstand for a short time. Thermal protection of the brake chopper can limit the available braking power to a lower value. Technical data 45 DC voltage limits of the drive Symbol DC voltage value depending on Uac 208…240 V AC 380…415 V AC 440…480 V AC 500 V AC 525…600 V AC 660…690 V AC R1-R3 UDC R4-R8 281…324 V DC 513…560 V DC 594…648 V DC 675 V DC 709…810 V DC 891…932 V DC UDC,chr 225 V DC 410 V DC 475 V DC 540 V DC 567 V DC 713 V DC UDC,ovc 389 V DC 700 V DC 778 V DC 810 V DC 1013 V DC 1118 V DC 239 V DC 436 V DC 505 V DC 574 V DC 602 V DC 757 V DC 800 V DC 878 V DC 880 V DC 1113 V DC 1218 V DC UDC,uvc UDC,ovt 489 440 UDC,uvt 168 V DC 308 V DC 356 V DC 405 V DC 425 V DC 535 V DC UDC,brcl 375 V DC 648 V DC 749 V DC 780 V DC 936 V DC 1077 V DC UDC,brch 403 V DC 697 V DC 806 V DC 806 V DC 1008 V DC 1159 V DC 3AXD10000114906 - 2013-10-24 Uac : AC input voltage. Set also parameter 95.01 Supply voltage in the drive control program to this value. All drives on the common DC system must have the same setting. Set parameter 95.02 Adaptive voltage limits to Disabled. Udc : Nominal DC link voltage = 1.35 × Uac in normal motoring operation mode of the drive. UDC,chr: Charging limit. Drive opens the charging circuit when the DC voltage reaches this limit at power up. UDC,ovc, UDC,uvc: Overvoltage control limit and Undervoltage control limit. The overvoltage and undervoltage control of the DC link voltage level are enabled by default. The drive limits the motoring and generating torque when necessary to keep the DC link voltage within the control limits. When a brake chopper and resistor are in use, you must disable the overvoltage control. UDC,ovt, U DC,uvt: DC overvoltage trip limit and DC undervoltage trip limit. The drive trips and gives a fault message if the DC link voltage reaches these levels. UDC,brcl, UDC,brch: Brake chopper limit low and Brake chopper limit high. The brake chopper starts operation when the DC link voltage reaches the low level and you have enabled the chopper with the drive parameter. If the DC link voltage level reaches the high level, the brake chopper will be at its maximum load. 46 Technical data DC fuses Drive type Fuse [A] Drive type ACS880-01- Fuse [A] ACS880-01- Drive type Fuse [A] ACS880-01- Drive type Fuse [A] ACS880-01- 04A6-2 10 02A4-3 10 02A1-5 10 07A3-7 16 06A6-2 16 03A3-3 10 03A0-5 10 09A8-7 20 07A5-2 16 04A0-3 10 03A4-5 10 14A2-7 32 10A6-2 20 05A6-3 10 04A8-5 10 018A-7 40 16A8-2 32 07A2-3 16 05A2-5 10 022A-7 40 24A3-2 50 09A4-3 20 07A6-5 16 026A-7 50 031A-2 63 12A6-3 25 11A0-5 20 035A-7 63 046A-2 100 017A-3 32 014A-5 32 042A-7 80 061A-2 125 025A-3 50 021A-5 40 049A-7 100 075A-2 160 032A-3 63 027A-5 50 061A-7 125 087A-2 160 038A-3 80 034A-5 63 084A-7 160 115A-2 250 045A-3 100 040A-5 80 098A-7 200 145A-2 315 061A-3 125 052A-5 100 119A-7 250 170A-2 315 072A-3 160 065A-5 125 142A-7 315 206A-2 400 087A-3 160 077A-5 160 174A-7 350 274A-2 500 105A-3 200 096A-5 200 210A-7 400 145A-3 315 124A-5 250 271A-7 500 169A-3 315 156A-5 315 206A-3 400 180A-5 350 246A-3 450 240A-5 450 293A-3 550 260A-5 500 363A-3 700 302A-5 550 430A-3 800 361A-5 700 414A-5 800 Further information Product and service inquiries Address any inquiries about the product to your local ABB representative, quoting the type designation and serial number of the unit in question. A listing of ABB sales, support and service contacts can be found by navigating to www.abb.com/searchchannels. Product training For information on ABB product training, navigate to www.abb.com/drives and select Training courses. Providing feedback on ABB Drives manuals Your comments on our manuals are welcome. Go to www.abb.com/drives and select Document Library – Manuals feedback form (LV AC drives). Document library on the Internet You can find manuals and other product documents in PDF format on the Internet. Go to www.abb.com/drives and select Document Library. You can browse the library or enter selection criteria, for example a document code, in the search field. Contact us www.abb.com/drives www.abb.com/drivespartners 3AUA0000127818 Rev B (EN) 2014-04-17